

Tree planting and moving robot
A robot and tree-moving technology, applied in manipulators, planting methods, forestry, etc., can solve the problems of low automation, slow speed, and a lot of manpower for trees, and achieve the effect of reducing labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0017] Such as Figure 1~5 Shown is a preferred embodiment of the present invention.
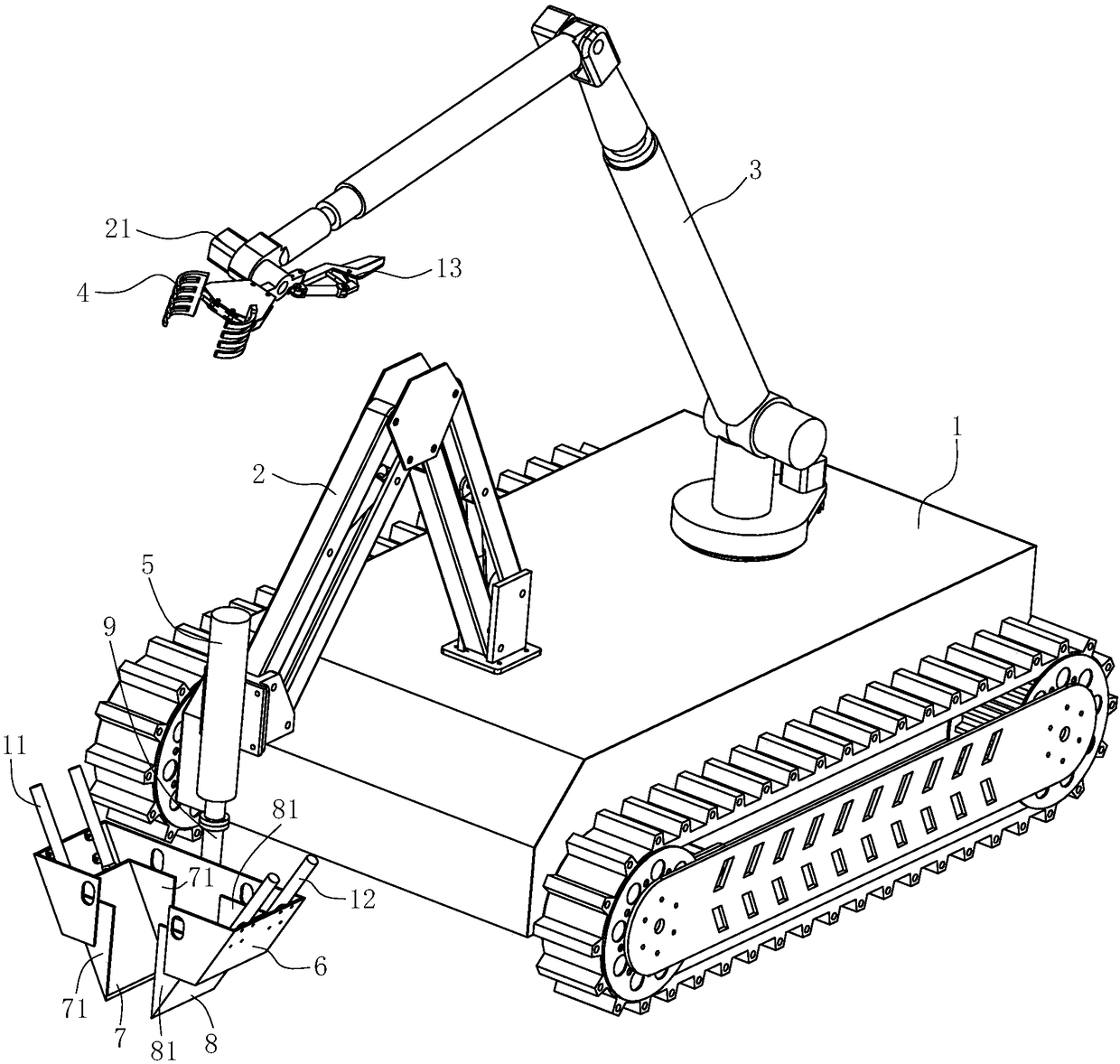
[0018] A tree-planting and tree-moving robot includes a walking vehicle 1, which can be a crawler vehicle, and reference can be made to an excavator.
[0019] The walking vehicle 1 is provided with an excavating arm 2 and a mechanical arm 3, the free end of the mechanical arm 3 is provided with a mechanical claw 4, the free end of the mechanical arm 2 is equipped with a motor 21, and the mechanical claw 4 is installed on the 21 output shaft of the motor , The output shaft of the motor 21 is also provided with hydraulic scissors 13, and the mechanical claw 4 and the hydraulic scissors 13 are arranged on the back.
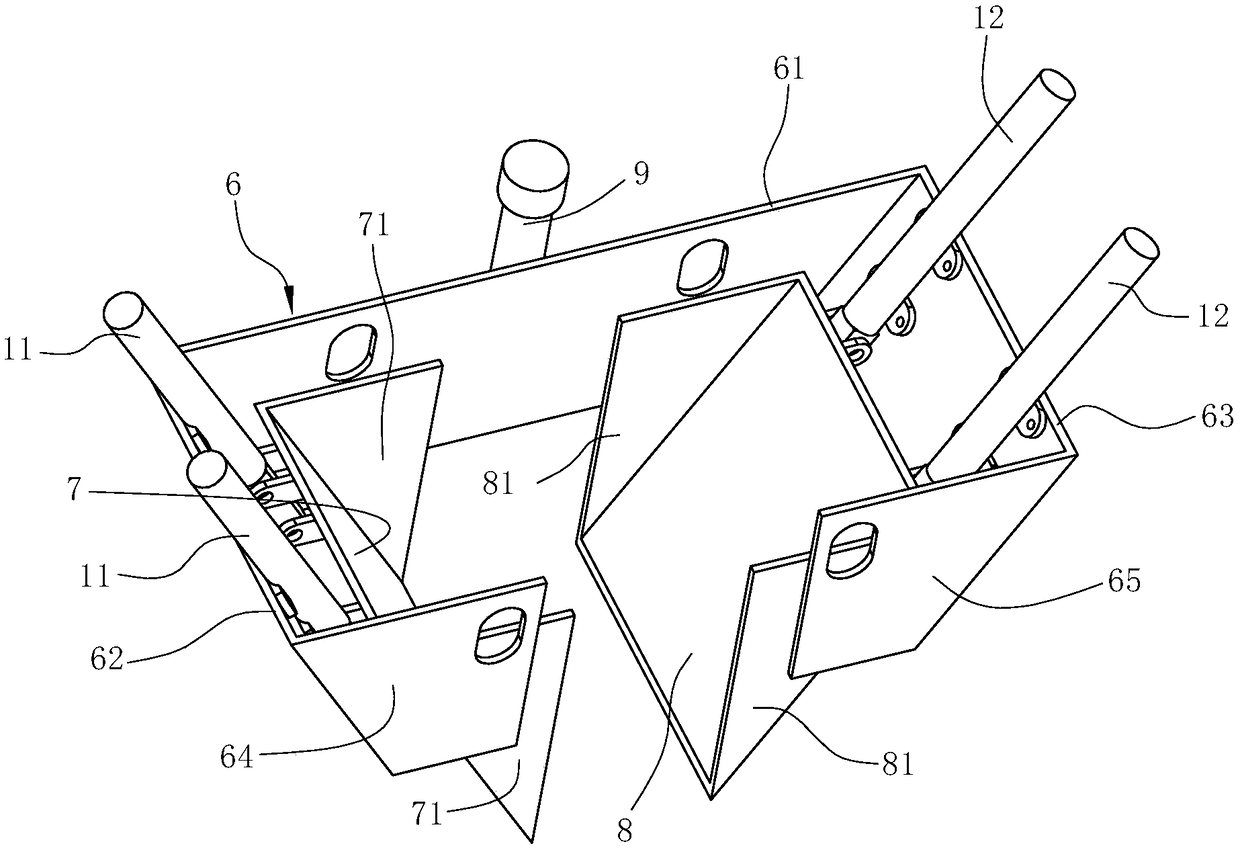
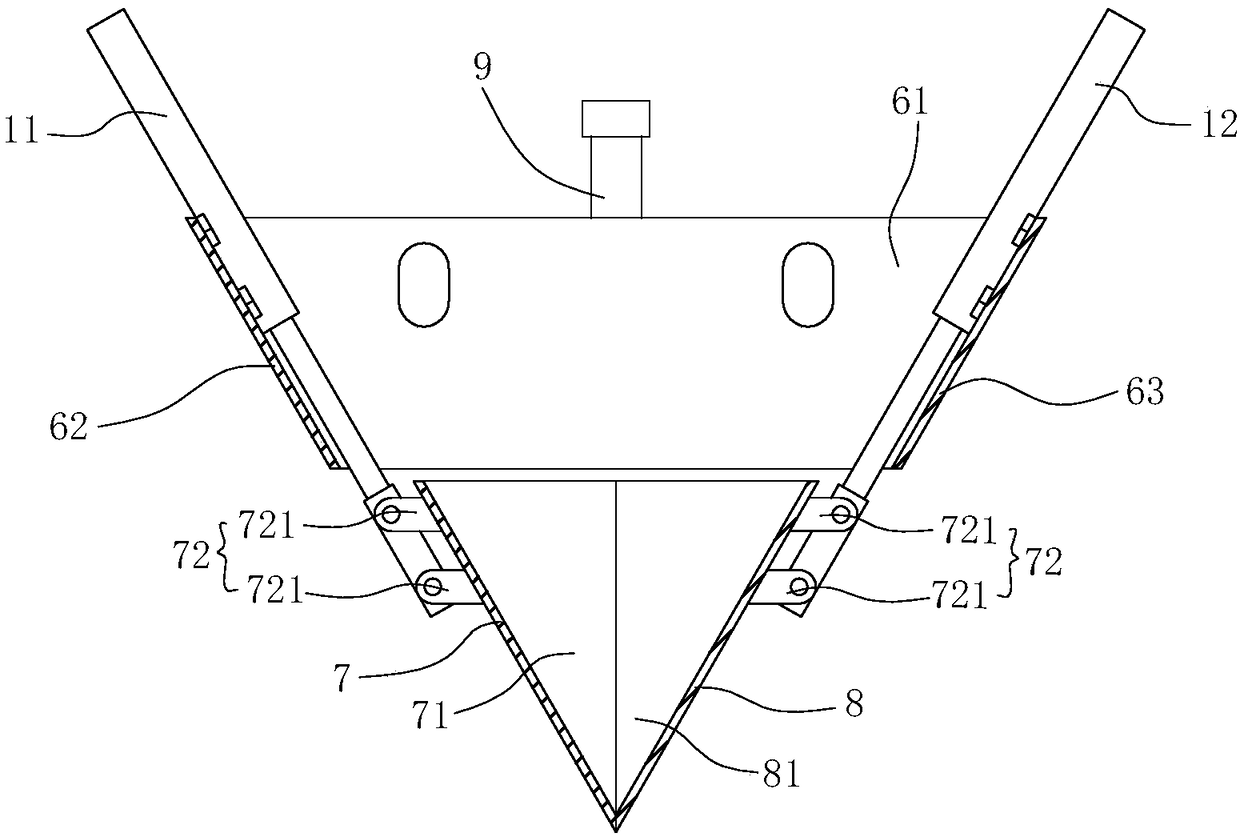
[0020] The free end of excavating arm 2 is equipped with the master oil cylinder 5 that is vertically arranged, and the telescoping rod of maste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More