Application method of improved trackless Kalman filtering algorithm to underwater integrated navigation
An unscented Kalman and filtering algorithm technology, applied in the field of inertial navigation, can solve the problems of increasing the amount of filtering calculation, difficulty in ensuring navigation accuracy, and inability to float on the water for a long time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0137] The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
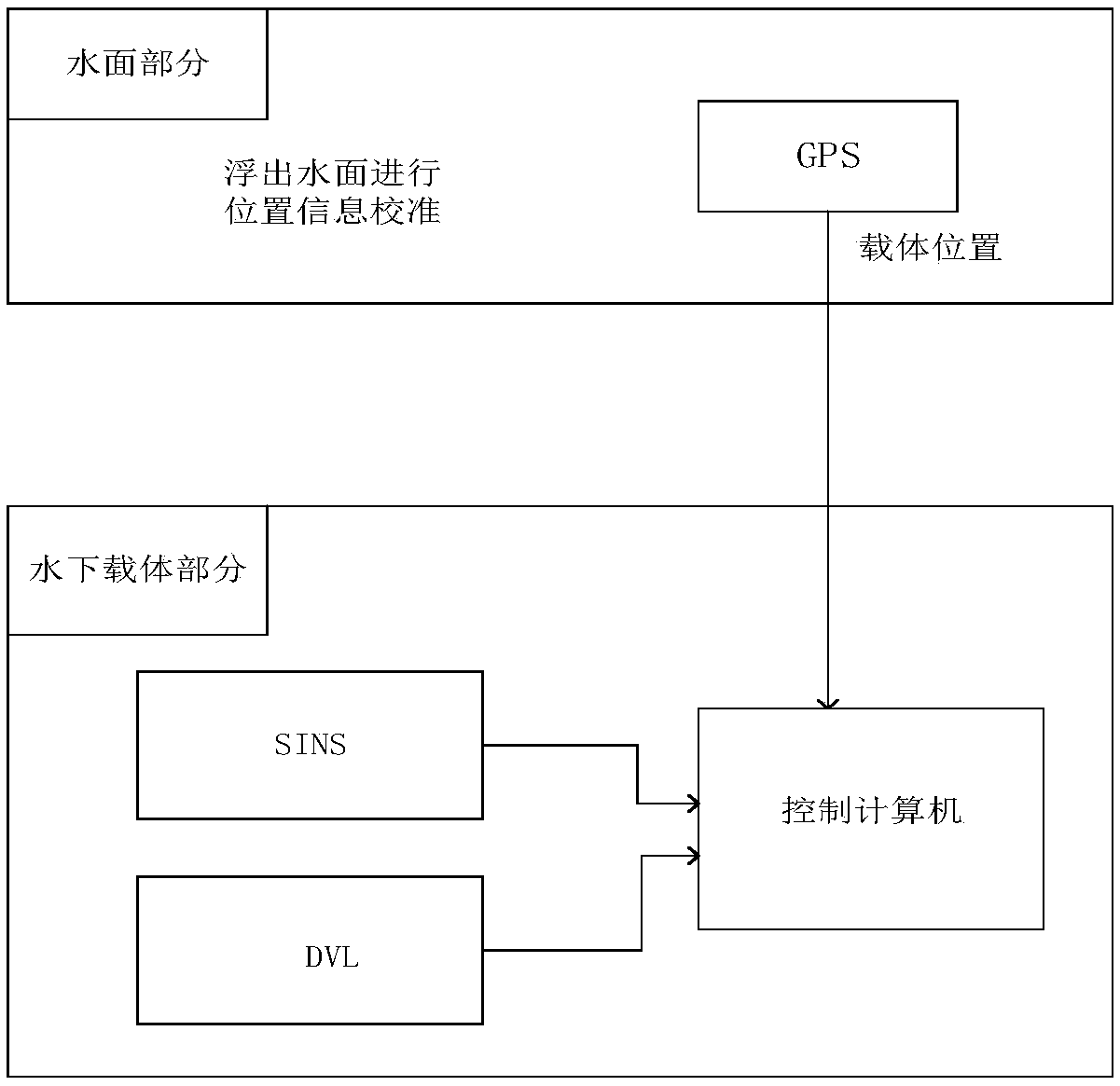
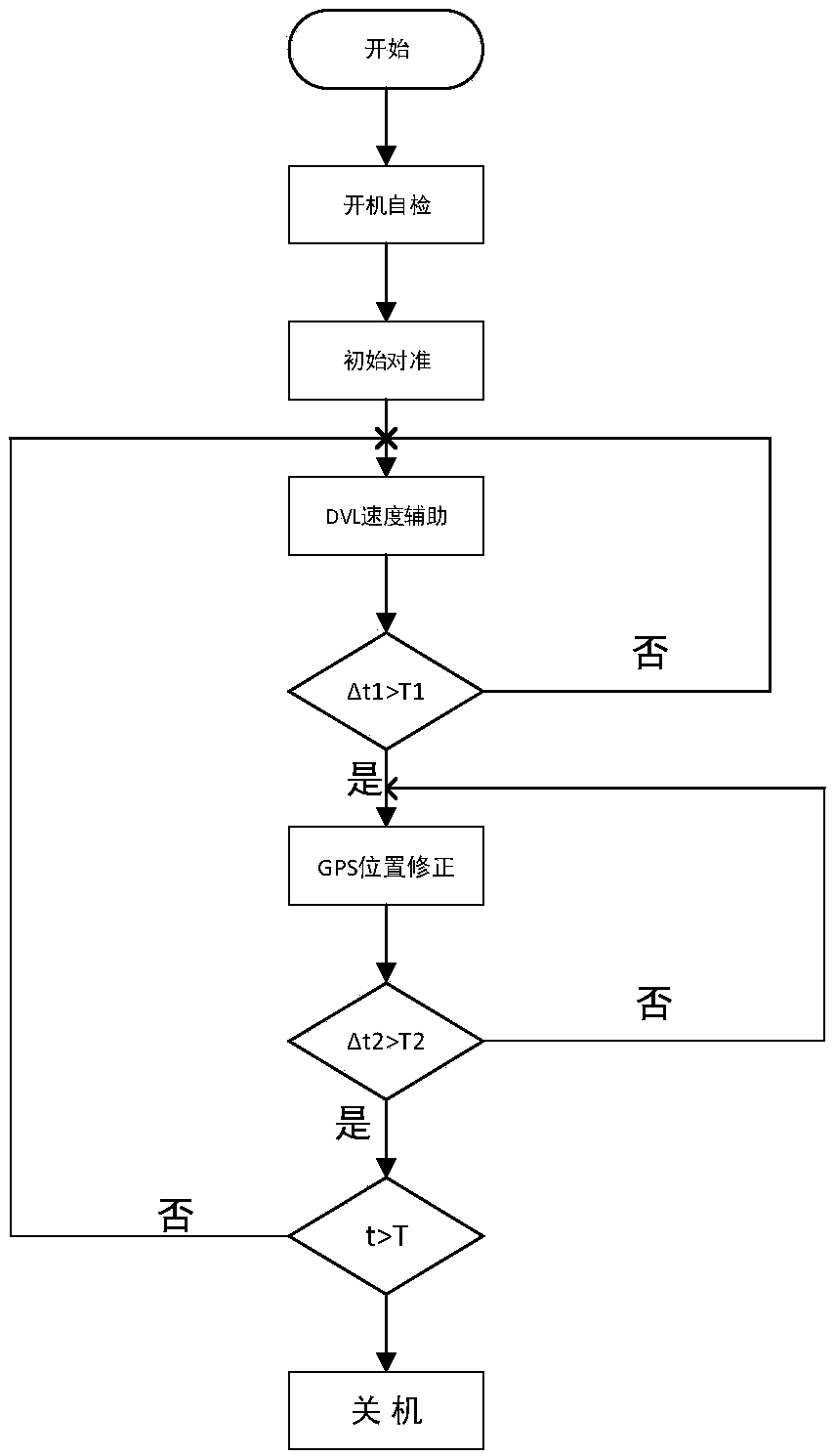
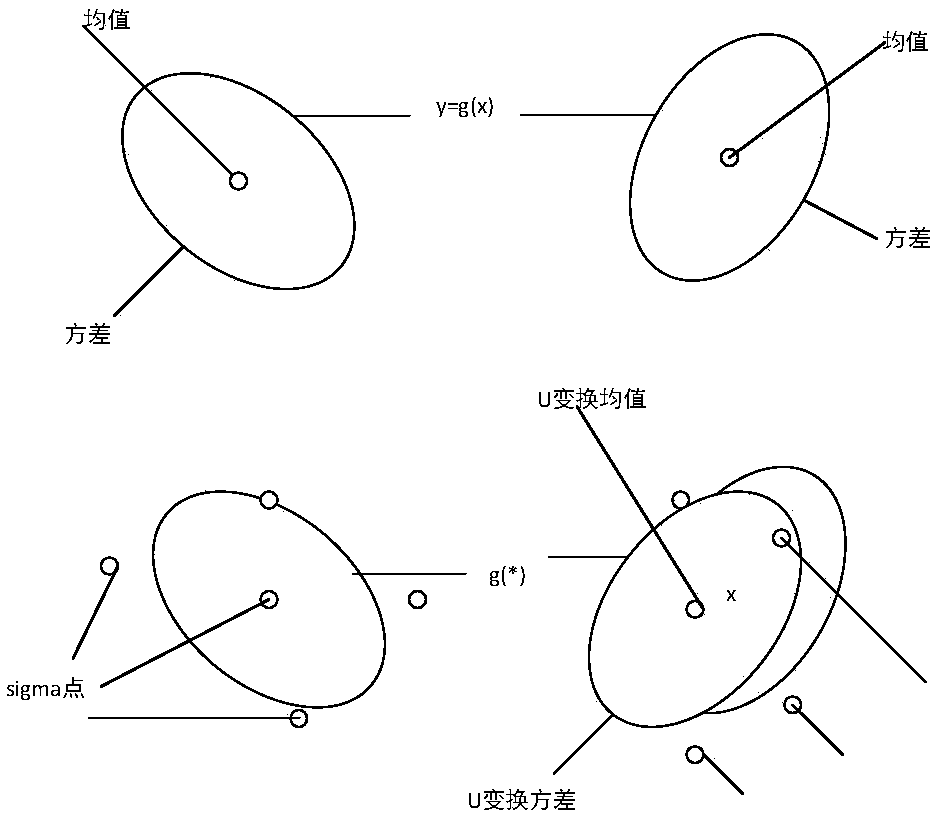
[0138] The application method of an improved unscented Kalman filter algorithm provided by the present invention in the underwater integrated navigation system SINS / DVL / GPS, the realization principle is as follows Figure 1-Figure 4 As shown, the process mainly includes the following steps:
[0139] Step 1: Define the coordinate system to be used;
[0140] (1) Define the coordinate system to be used as follows:
[0141] i——Inertial coordinate system: does not rotate with the earth, the origin is at the center of the earth, z i Axis points to North Pole, x i Axis points to equinox, y i axis and x i ,z i form a right-handed coordinate system;
[0142] e——Ear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More