First perspective line patrol robot
A line inspection robot and viewing angle technology, applied in the field of line inspection robots, can solve problems such as affecting the line inspection effect, the relative position of the camera and the fuselage remaining unchanged, and difficulty in judging the relative position of the fault, so as to achieve the effect of improving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
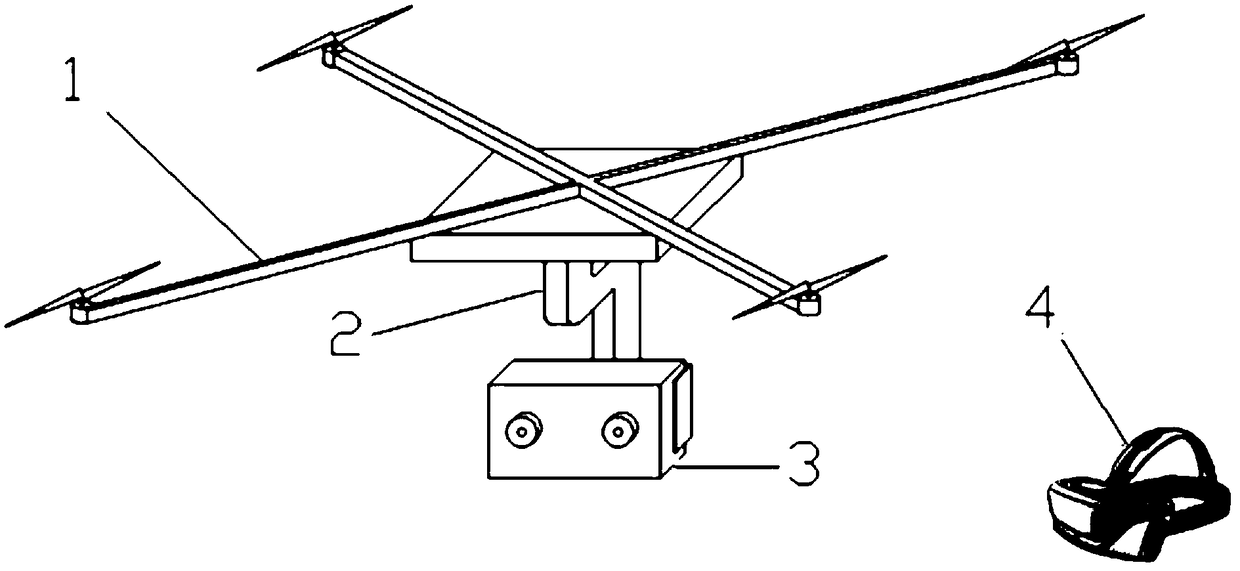
[0017] A line inspection robot from the first perspective, such as figure 1 As shown, it includes: line inspection robot platform 1, pan-tilt system 2, binocular camera 3 and VR glasses 4. In this embodiment, an unmanned aerial vehicle may be used as the line inspection robot platform.
[0018] The gimbal system is fixed on the UAV and powered by the UAV. Its movable mechanism is driven by a motor, which can receive the head rotation control information sent by the VR glasses, so that the movable mechanism can make corresponding rotations, and the shooting angle is the first. perspective.
[0019] The binocular camera is fixed on the movable mechanism of the pan-tilt system, powered by the pan-tilt system, and takes images with depth of field information through the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com