

Method for registering target contour point cloud based on monocular depth sensor and mechanical arm
A technology of depth sensor and target contour, applied in the field of robotics and computer vision, can solve the problems of high hardware platform requirements, complex calculation, inability to efficiently complete point clouds, etc., to achieve the effect of reducing calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The present invention will be described in detail below in conjunction with specific embodiments.
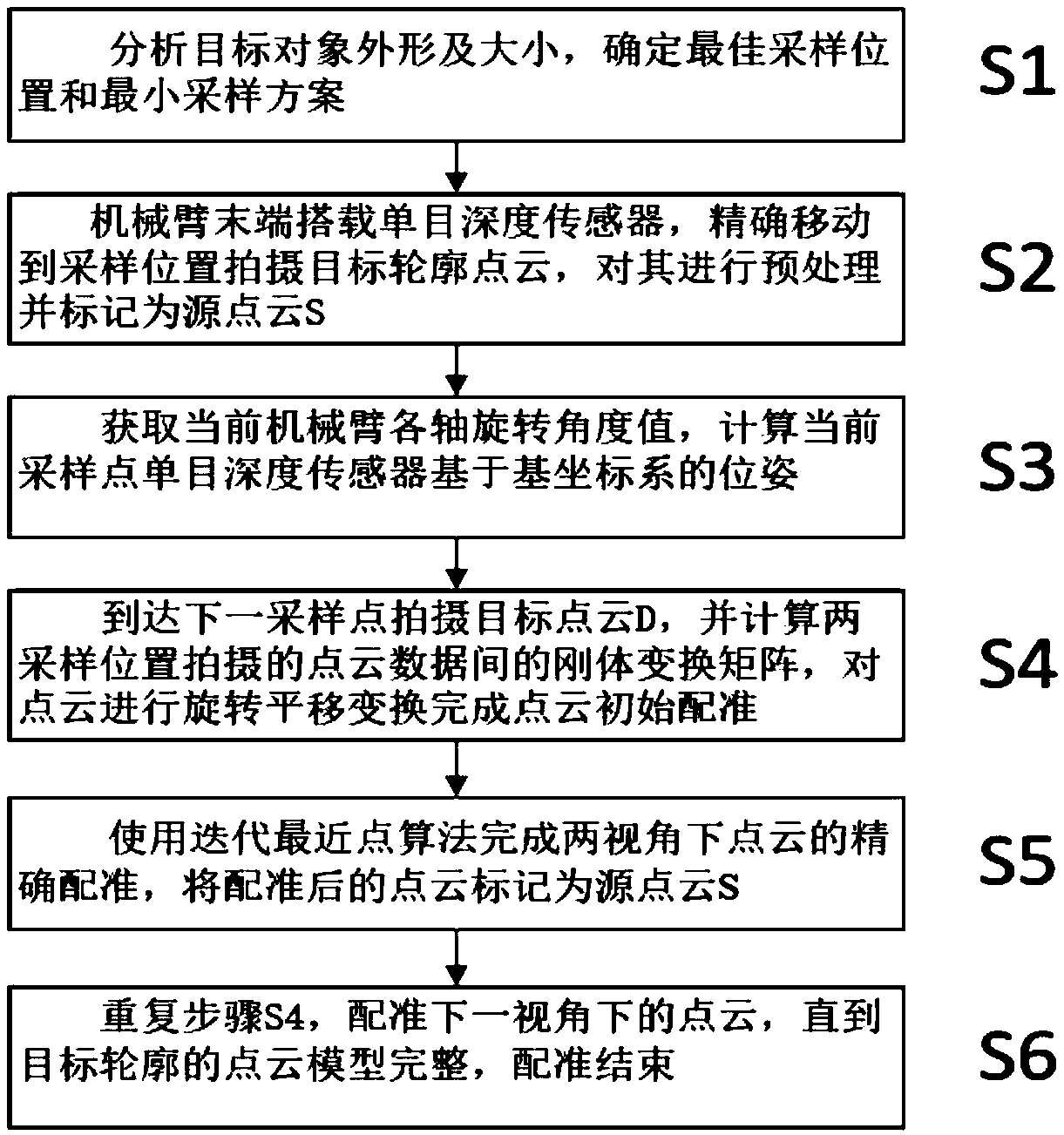
[0034] refer to figure 1 , the method of this embodiment based on the monocular depth sensor using the robotic arm to register the target contour point cloud includes the following steps:
[0035] Step S1, according to the type and size of the target object, determine the optimal sampling position and the minimum sampling point scheme, according to the appearance and shape of the target object, first collect several point cloud data around it, and observe the effective points containing the target object in the point cloud The proportion of the number of clouds, looking for the point cloud with a higher proportion to determine the best sampling position, looking for the best sampling position under different viewing angles, until the complete point cloud outline can be registered;
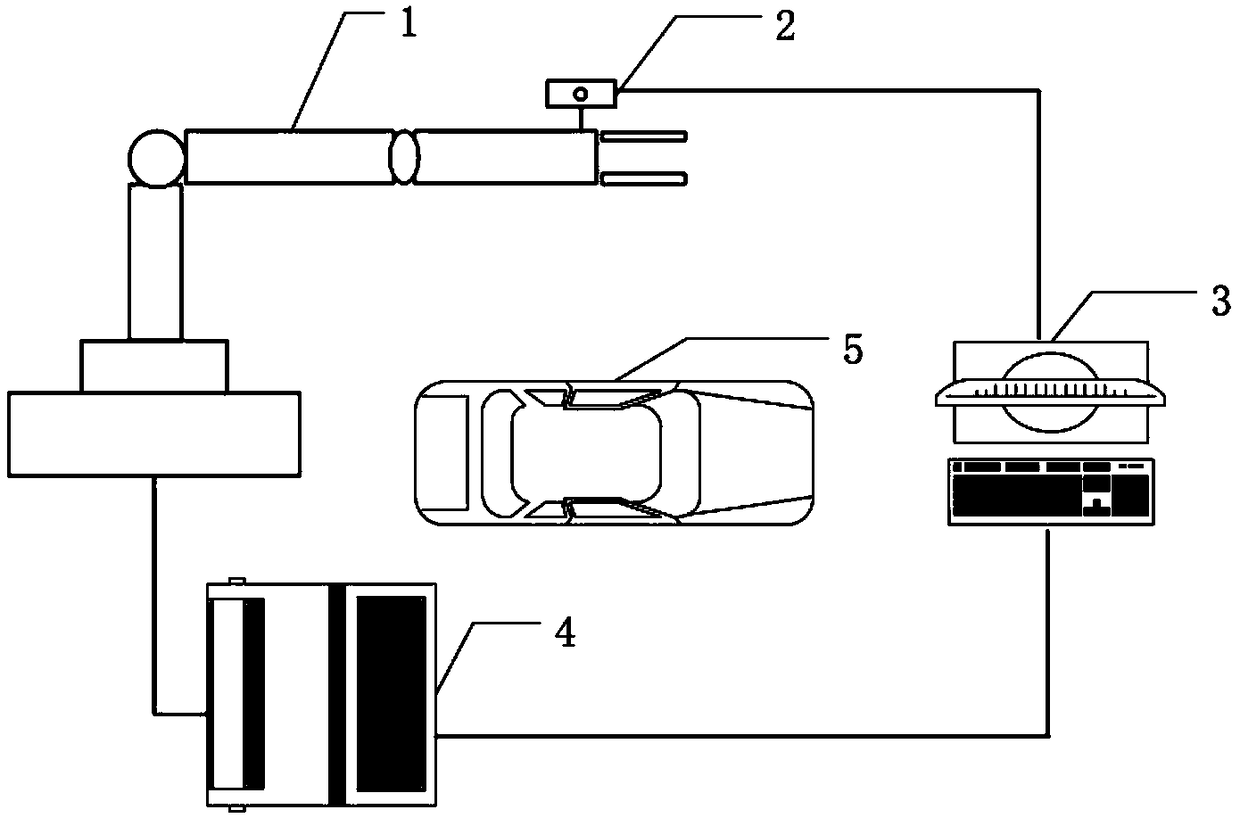
[0036] Step S2, the end of the robotic arm (1) is equipped with a monocular depth sensor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More