

Modular multi-joint drive-by-wire robot
A multi-joint, modular technology, applied in the field of robotics, can solve problems such as joint connection is not compact, low motion accuracy, etc., to achieve the effect of compact structure, small size, and easy production and processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
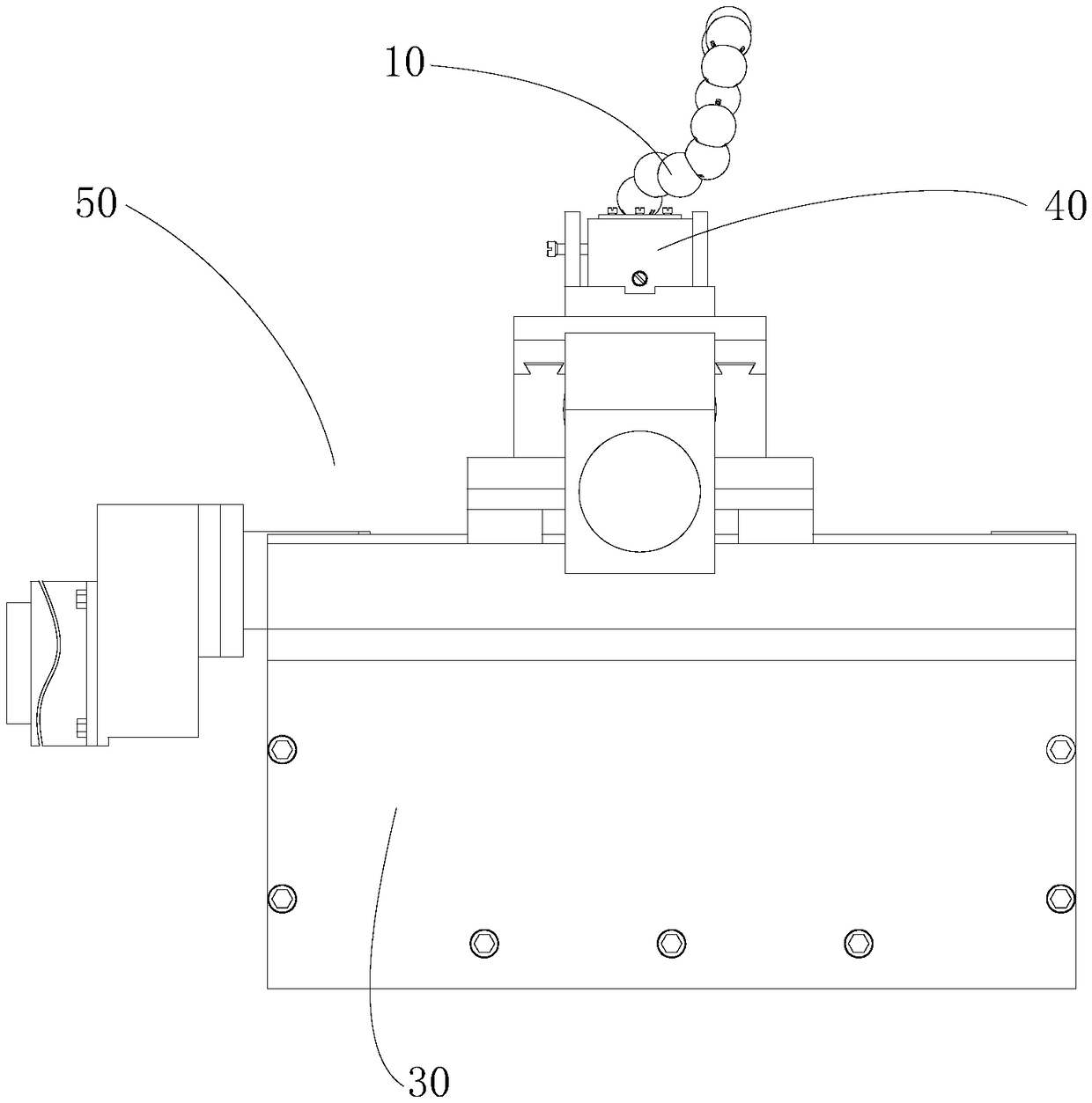
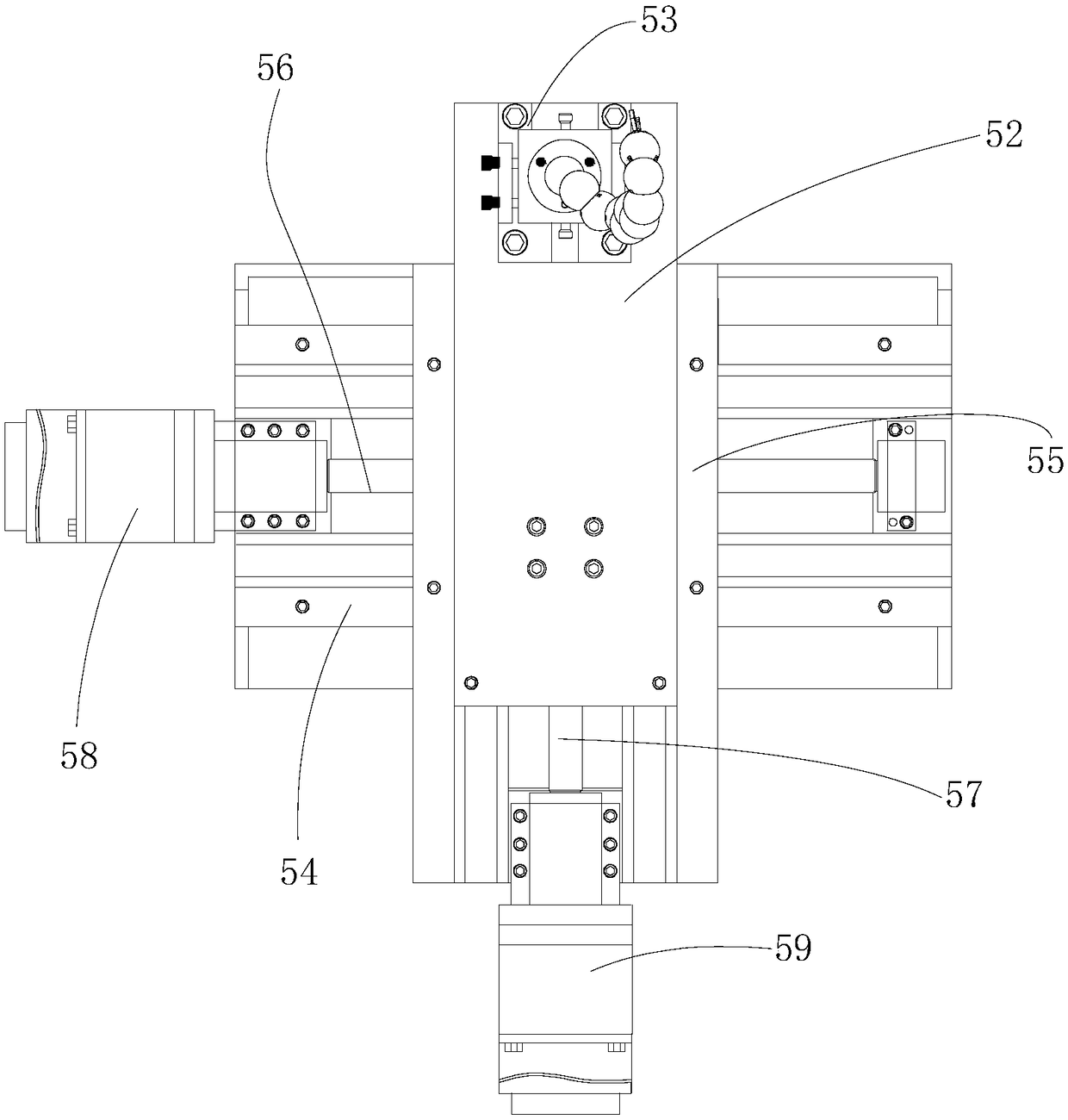
[0073] In addition to being able to complete the grasping work, the modular multi-joint wire-controlled robot also needs to have the ability to move flexibly in a large space. In order to realize the above functions, as a specific implementation of the modular multi-joint wire-controlled robot provided by the present invention , the workbench 50 includes the following parts (see figure 1 , figure 2 , Figure 8 and Figure 9 ):
[0074] a first mobile platform 51;
[0075] The first screw mechanism 56 is connected with the first mobile platform 51 to drive the first mobile platform 51 to move;
[0076] The first driving mechanism 58 is connected with the first lead screw mechanism 56;
[0077] The first fixed seat 54 is connected with the first mobile platform 51 and is used to support the first screw mechanism 56 and the first drive mechanism 58; the first screw mechanism 56 is located inside the first fixed seat 54, and the first drive mechanism 58 is located at the si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More