

A steering angle tracking method for autopilot vehicle with unknown EPS characteristics
An automatic driving, steering wheel technology, applied in steering mechanism, vehicle parts, transportation and packaging, etc., can solve the problems of only considering road potholes and wind resistance, only considering the interference of slope gravity lateral components, etc., to achieve the effect of improving tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The following embodiments describe in detail a method for tracking the steering wheel steering angle of a self-driving car with unknown EPS characteristics according to the present invention in conjunction with the accompanying drawings.
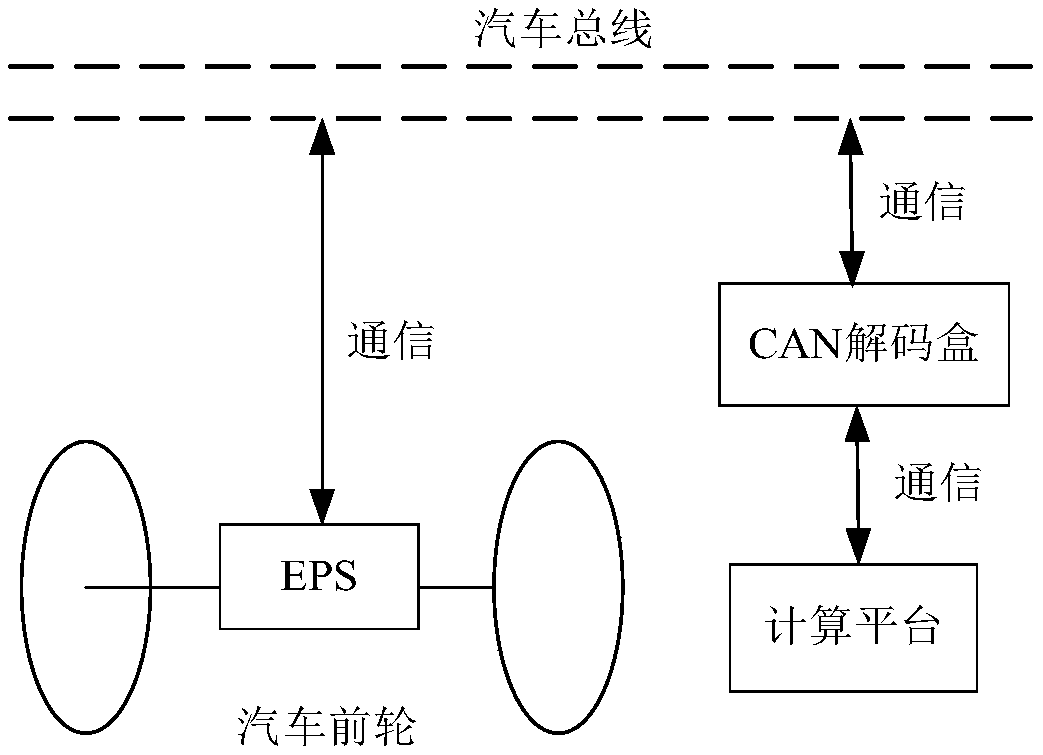
[0043] Apply the method of the present invention to figure 1 In the hardware system shown, the hardware system includes a computing platform, a CAN decoding box, an autonomous vehicle bus, EPS, and the front wheel of an autonomous vehicle.
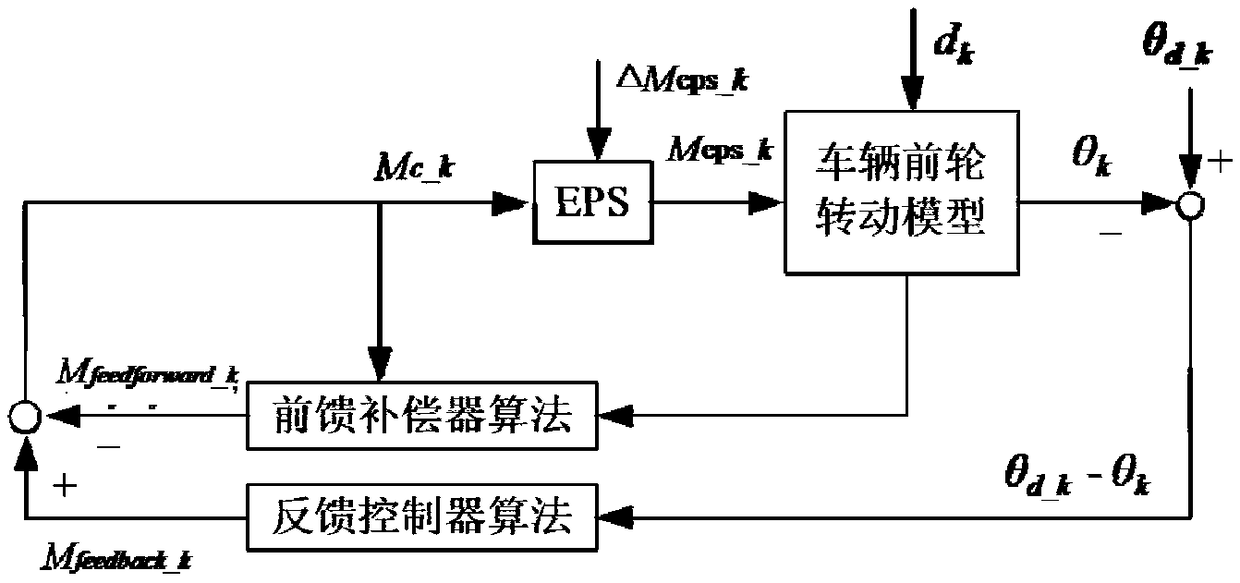
[0044] A method for tracking the steering wheel steering angle of a self-driving car with unknown EPS characteristics in an embodiment of the present invention. This method is continuously carried out during the driving process of the self-driving car. For its structural principle diagram, see figure 2 , including the following steps:
[0045] 1) Set the time difference Δτ between the two frames before and after the cycle period, Δτ is selected according to actual needs, usually less than 0.1ms;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More