

Robot smooth obstacle avoiding movement scheduling method based on tangent recursion
A motion planning and robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex trajectory calculation, achieve a small amount of calculation, continuous acceleration and jerk without sudden change, and obstacle avoidance trajectory smooth without impact. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
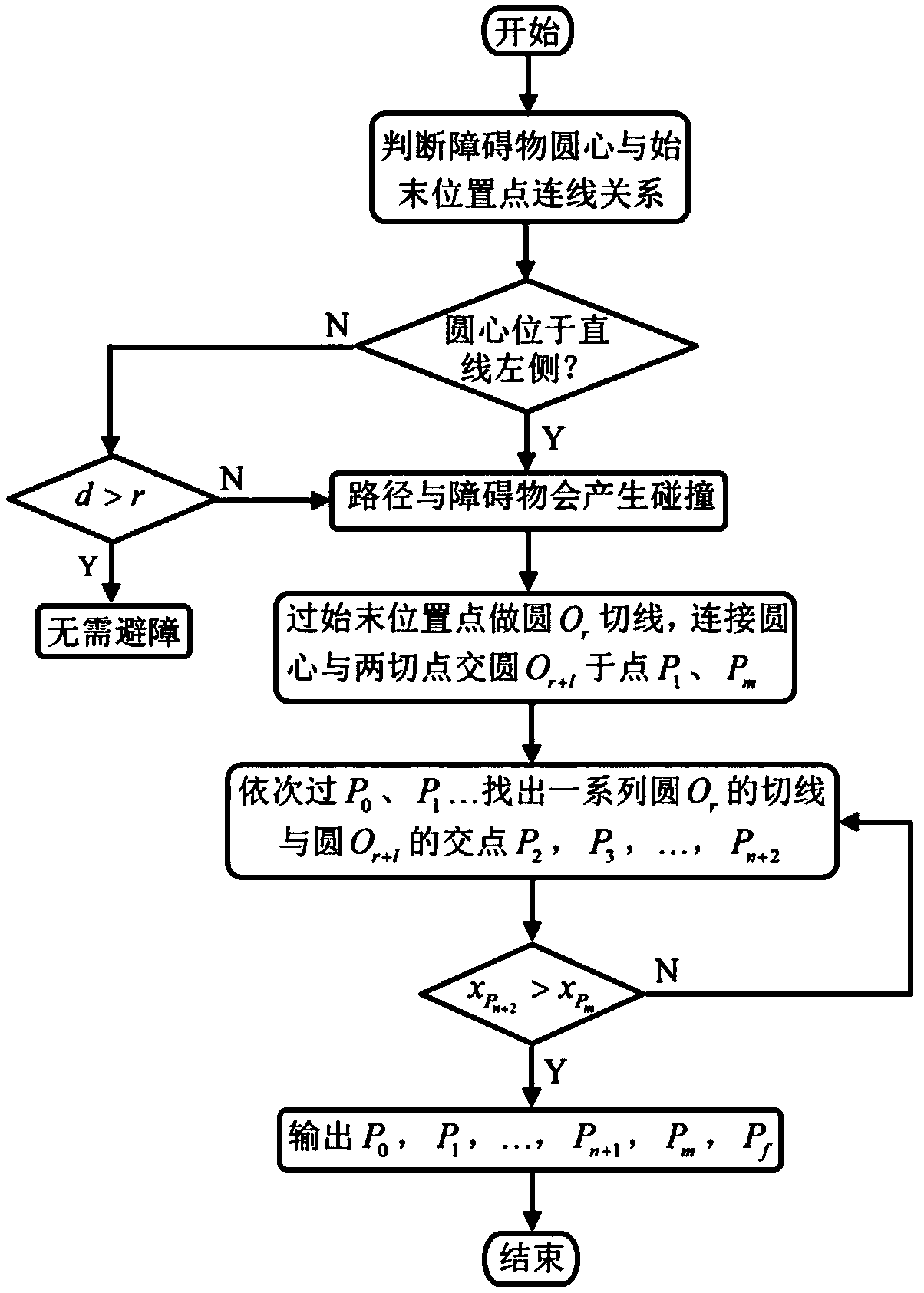
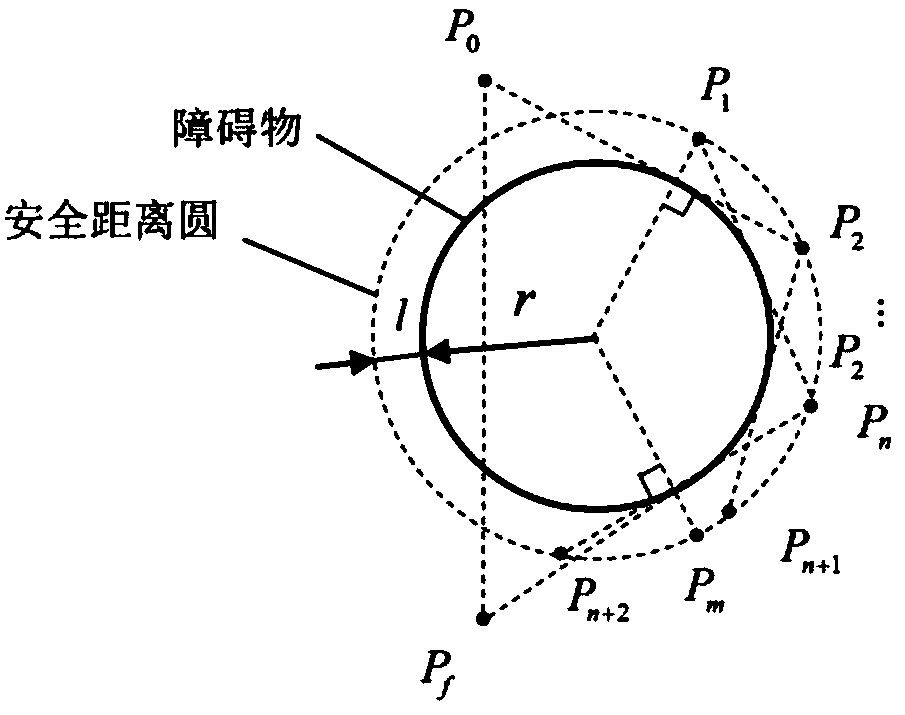
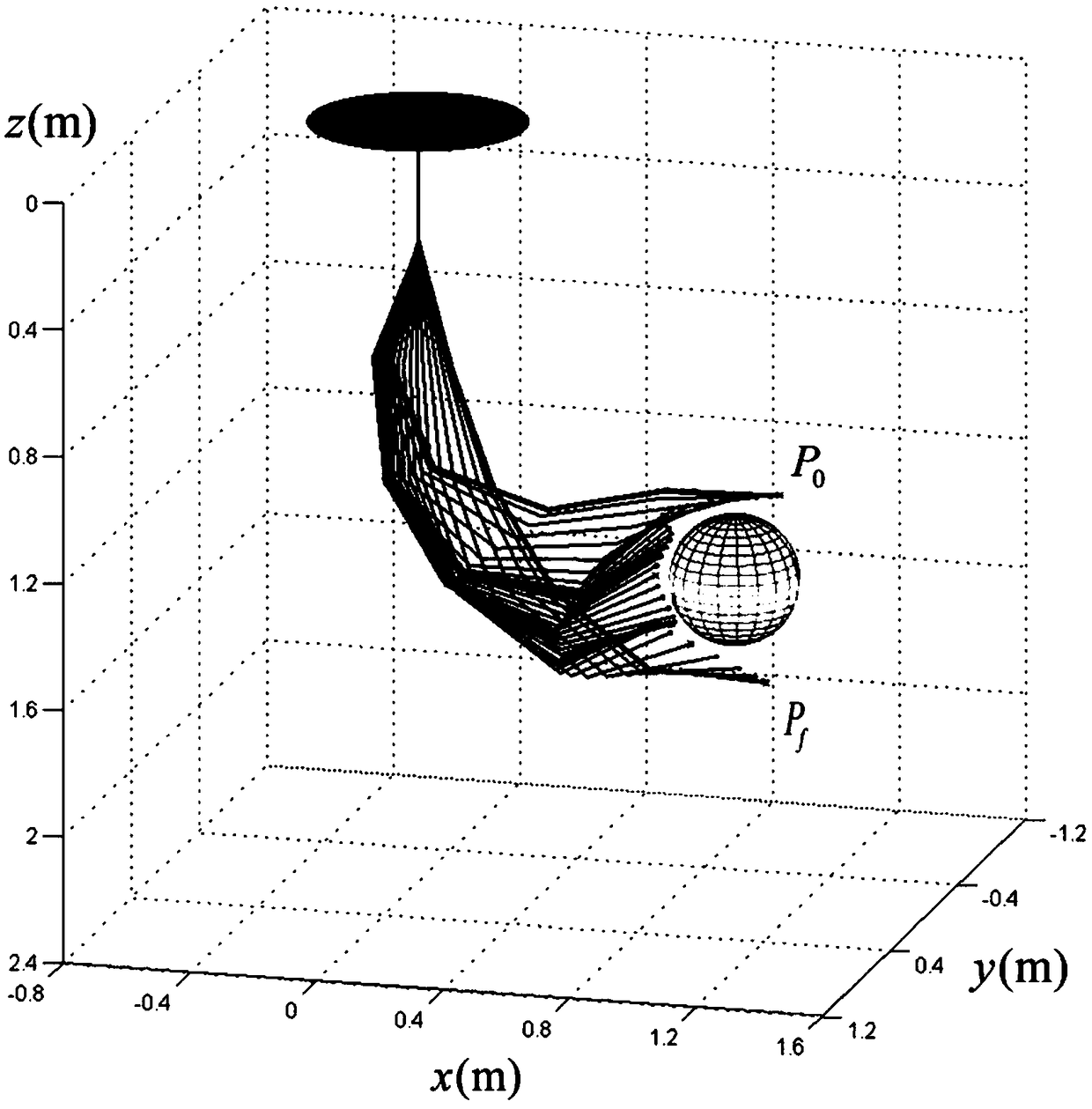
[0039] A robot smooth obstacle avoidance motion planning method based on tangent recursion in the embodiment of the present invention, its idea is to obtain the collision-free path point with a geometric method under the condition of a certain safety distance, the calculation amount is relatively small, and then use the ridge model After the inverse solution is obtained by the state method, a smooth obstacle avoidance motion path is obtained through seven times of B-spline interpolation. The speed, acceleration, and jerk of each driving joint are continuous without sudden changes, and the motion characteristics are good. In theory, no impact is achieved.
[0040] In order to make the purpose, technical solution and advantages of the present invention clearer, the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More