

Flexible manipulator based on sensing of bionic strain sensor array
A technology of strain sensors and manipulators, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of not being able to sense and adapt to the surrounding environment, and achieve the effects of controllable finger bending, light weight, and high grip and fit
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
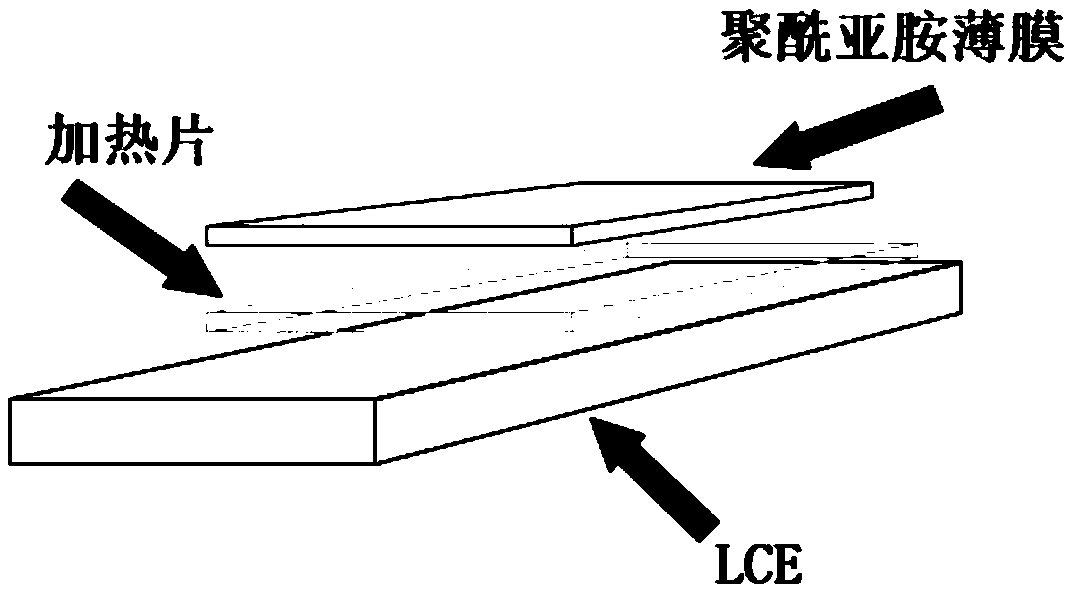
[0014] The invention is a flexible manipulator developed on the basis of the mechanism research on the liquid crystal elastic body and the bionic strain sensor. The liquid crystal elastomer is quoted from an article in Advanced Materials (Wang C, Sim K, Chen J, etal.Soft Ultrathin Electronics Innervated Adaptive Fully Soft Robots[J].Advanced Materials,2018,30(13):1706695.) The preparation method of the bionic strain sensor is an article in Nanoscale (Han Z, Liu L, Zhang J, et al. High-performance flexible strain sensor with bio-inspired crack arrays. [J]. Nanoscale, 2018.) the sensor.
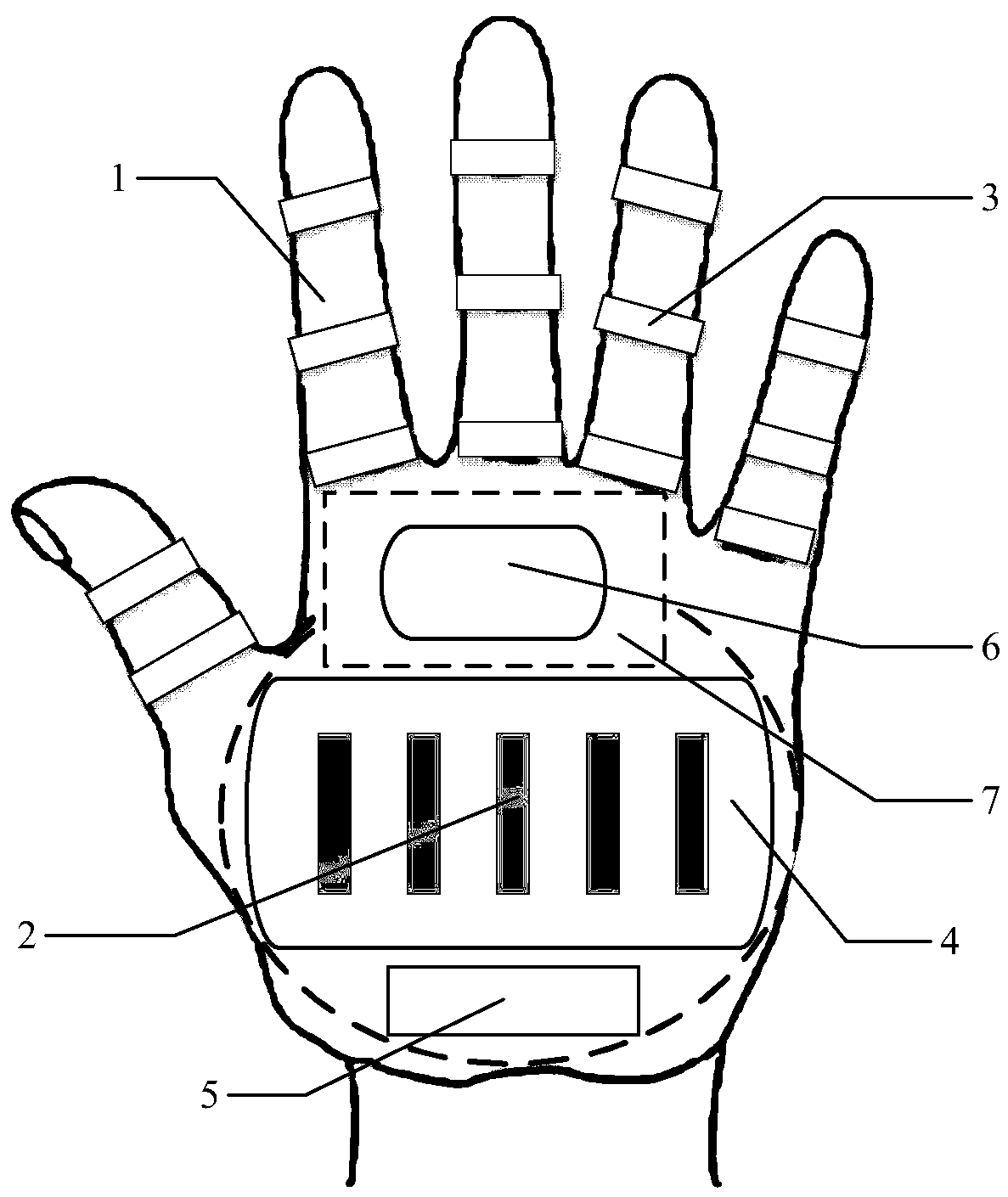
[0015] see figure 1 , the manipulator of the present invention uses a new type of bionic strain sensor (3cm wide, 1cm long) to form a 1*5 array at the palm of the hand to sense the size and weight of external objects. It has the characteristics of ultra-sensitivity, stability, softness, and cheapness, and is suitable for imitating the tactile perception of human hand skin; the manipulator is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More