

Ship lateral three-degree-of-freedom motion parameter identification method based on a multi-objective evolutionary algorithm
A multi-objective evolution and motion parameter technology, which is applied in computing, electrical digital data processing, design optimization/simulation, etc., can solve problems such as complex operation, low precision, and mutual influence of parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0129] The parameters of the HD702 boat involved in the experiment: the mass of the hull is m=442000kg, the breadth of the ship is B=7.2m, the draft is 2.25m, the length of the waterline is Lpp=60m, I 5 =(0.25*Lpp) m=99450000(kg m 2 ), X R =25.8m, Z R = 1.32m, the number of rudders is n = 2, the hydrostatic restoring force coefficient C 44 =3370000. The basic parameters of the algorithm are set as follows:. The three-dimensional measurement noise V is Gaussian white noise with a mean value of zero, and the noise disturbance variance matrix can be taken as Qvv=diag[2.03*10 for a sensor with a first-level precision -6 2.25*10 -7 2.25*10 -7 ]. The sampling time is 40 seconds, the sampling interval is 0.2 seconds, and the multi-objective function is shown in formula (10), N=200.
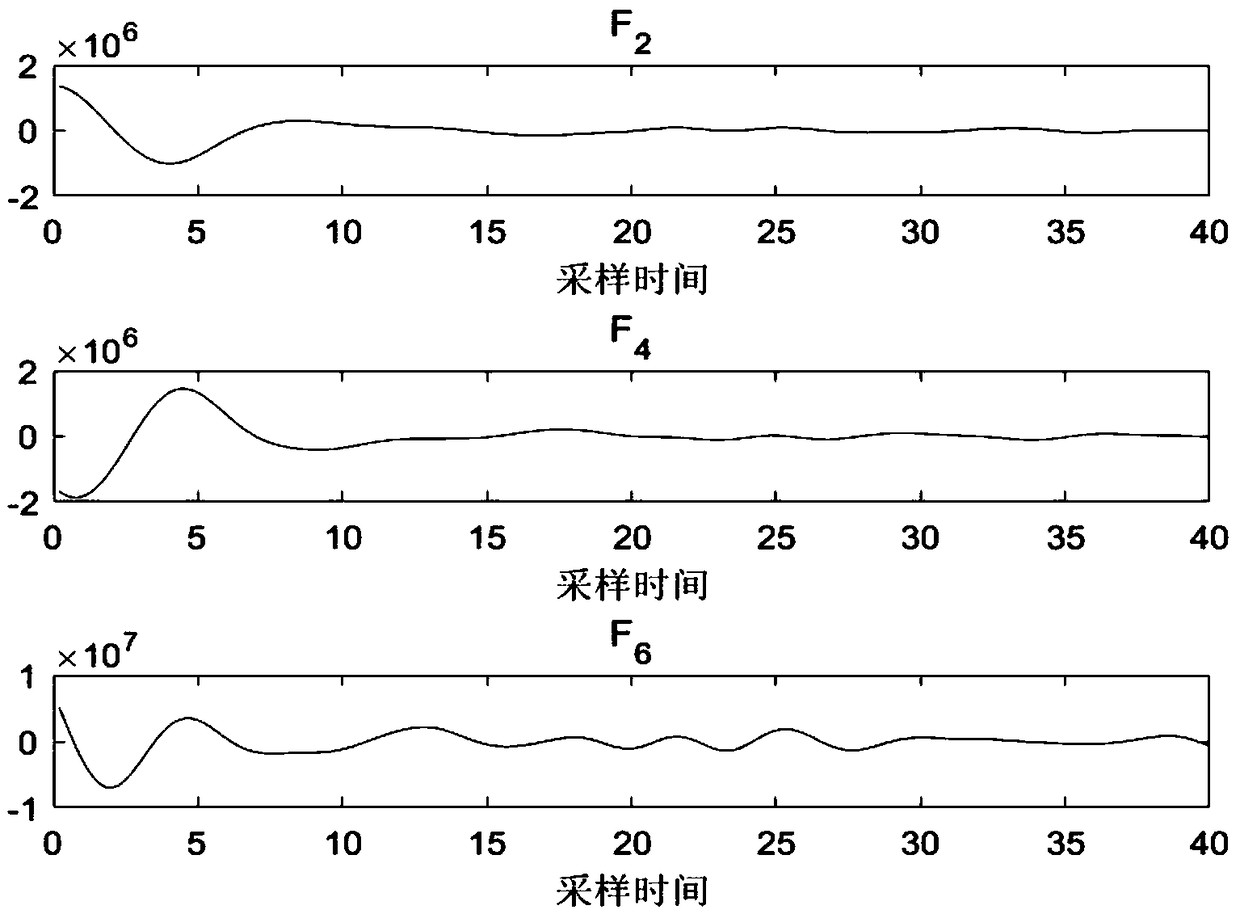
[0130] Input: For a sample of wave disturbance forces and moments see figure 2 shown.
[0131] Observations:
[0132] Swing observations see Figure 5 Shown in the middle blue curve (data c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More