

Obstacle detection method and device, electronic device, vehicle and storage medium
An obstacle detection and obstacle technology, applied in obstacle detection, vehicles and storage media fields, can solve problems such as inability to achieve accurate and effective detection, missed detection by lidar, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
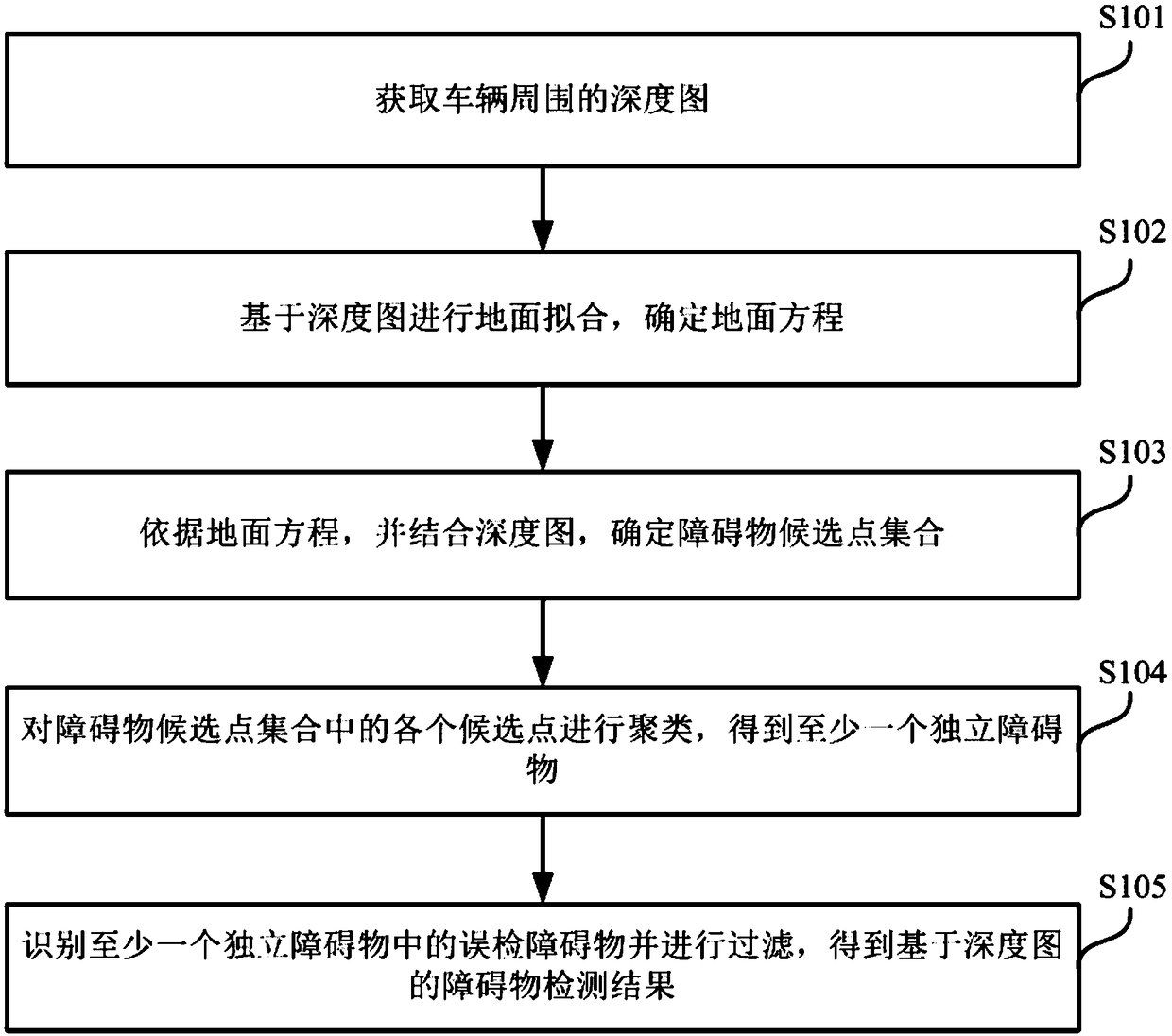
[0060] figure 1 This is a schematic flowchart of the obstacle detection method provided in Embodiment 1 of the present invention. The method may be executed by an obstacle detection device or an electronic device, and the device or electronic device may be implemented by software and / or hardware. The device or electronic device The device can be integrated in any smart device with network communication capabilities, such as a vehicle, which can be an unmanned vehicle. like figure 1 As shown, the obstacle detection method may include the following steps:
[0061] S101. Obtain a depth map around the vehicle.
[0062] In computer vision systems, 3D scene information provides more possibilities for various computer vision applications such as image segmentation, target detection, and object tracking. a wide range of applications. In 3D computer graphics, a depth map is an image or image channel that contains information about the distance to the surface of a scene object from ...
Embodiment 2
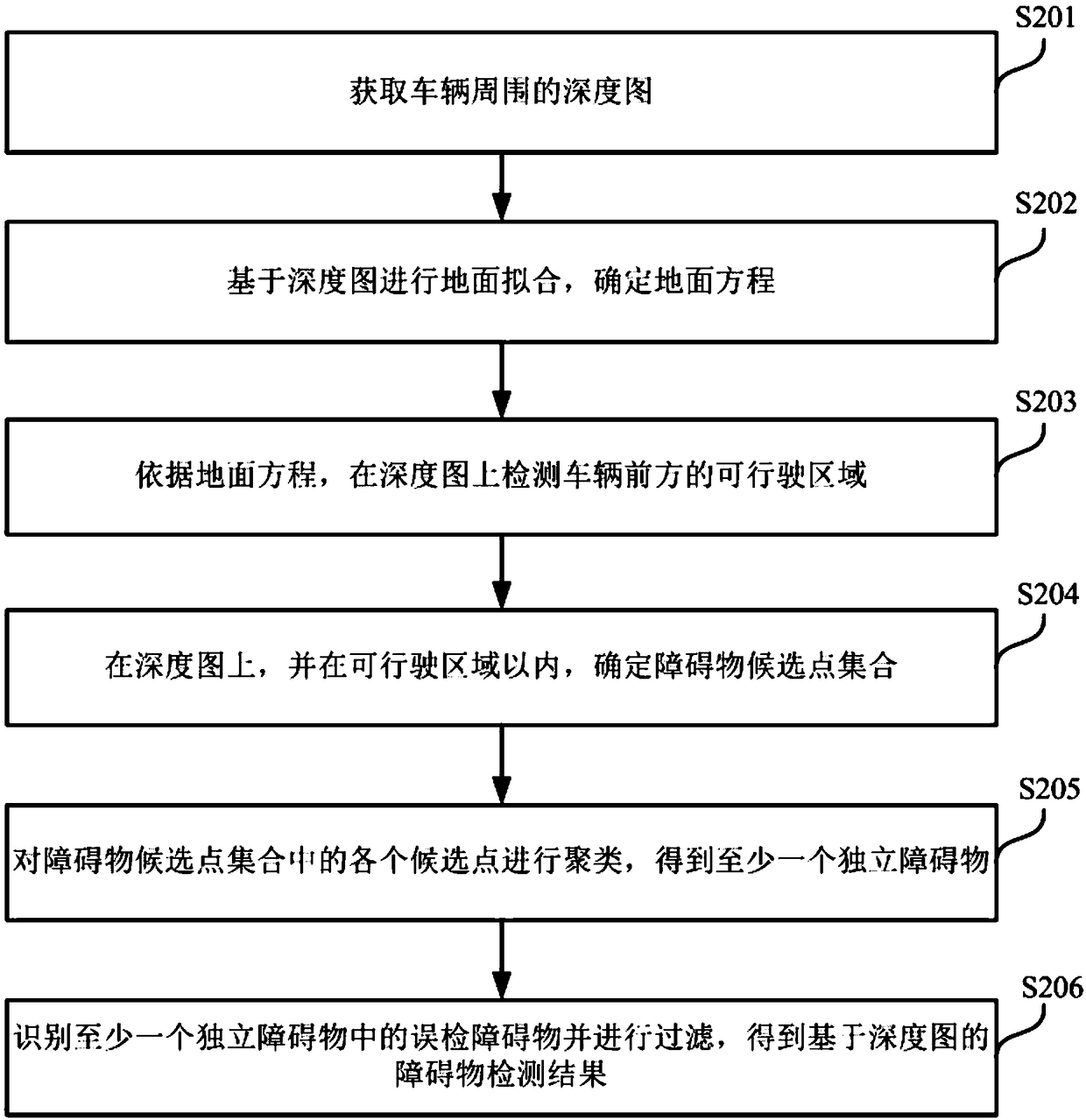
[0075] figure 2 This is a schematic flowchart of the obstacle detection method provided in the second embodiment of the present invention. like figure 2 As shown, the obstacle detection method may include the following steps:
[0076] S201. Obtain a depth map around the vehicle.
[0077] S202. Perform ground fitting based on the depth map, and determine a ground equation.
[0078] S203. According to the ground equation, detect the drivable area in front of the vehicle on the depth map.
[0079] In a specific embodiment of the present invention, the electronic device can detect the drivable area in front of the vehicle on the depth map according to the ground equation. That is, after the electronic device acquires the depth map around the vehicle, the electronic device can detect the drivable area and the non-drivable area in front of the vehicle on the depth map. Specifically, the electronic device can calculate the touchdown point on the depth map according to the grou...
Embodiment 3
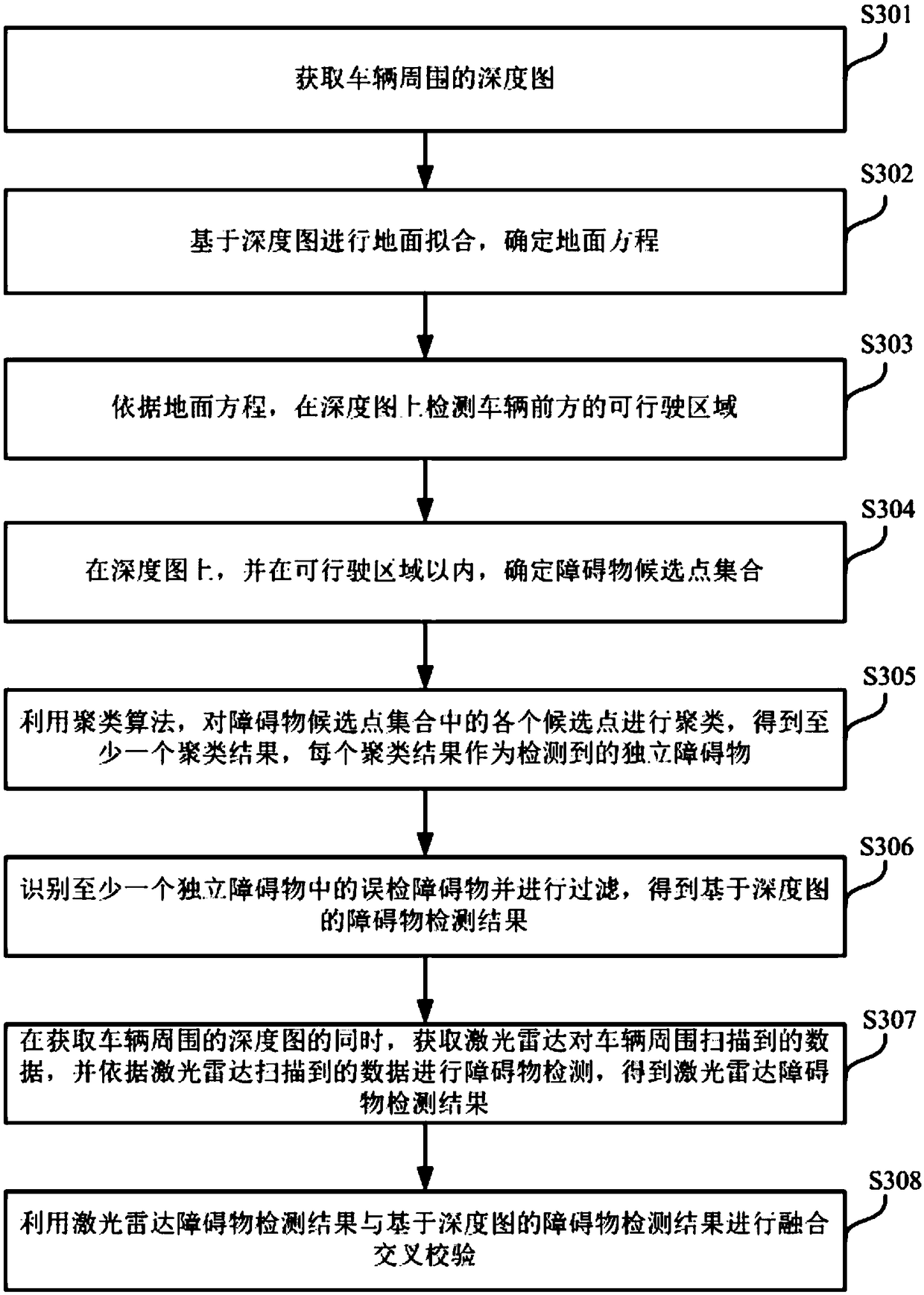
[0088] image 3 This is a schematic flowchart of the obstacle detection method provided in Embodiment 3 of the present invention. like image 3 As shown, the obstacle detection method may include the following steps:
[0089] S301. Obtain a depth map around the vehicle.
[0090] S302. Perform ground fitting based on the depth map, and determine a ground equation.
[0091] S303. According to the ground equation, detect the drivable area in front of the vehicle on the depth map.
[0092] S304 , on the depth map and within the drivable area, determine a set of candidate obstacle points.
[0093] S305. Use a clustering algorithm to cluster each candidate point in the obstacle candidate point set to obtain at least one clustering result, and each clustering result is used as a detected independent obstacle.
[0094] S306. Identify and filter the falsely detected obstacles in at least one independent obstacle to obtain an obstacle detection result based on the depth map.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More