

An Analysis Method Directly Based on Convergence Time of Fourth-Order Compass Azimuth Alignment System
An alignment system and convergence time technology, applied in the field of inertial navigation, can solve problems such as analysis, no direct analysis of the fourth-order compass azimuth alignment control system, and little compass alignment convergence time, to achieve satisfactory accuracy and azimuth accuracy the effect of the requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
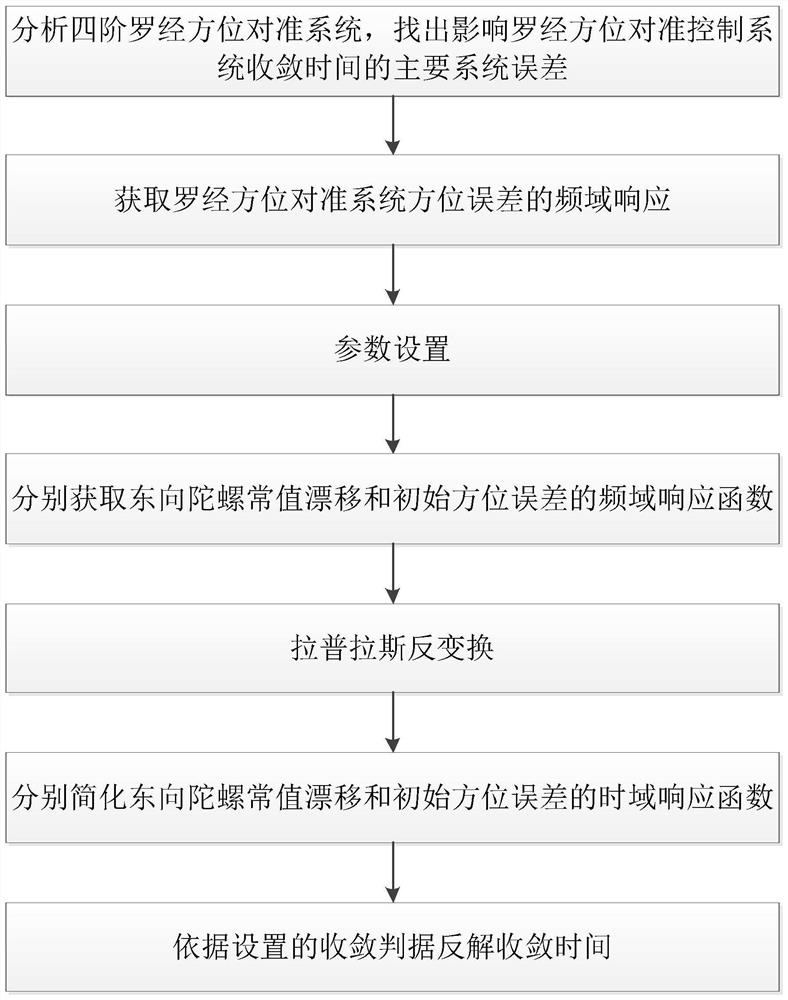
[0046] The purpose of the present invention is to provide an analysis method based directly on the convergence time of the fourth-order compass azimuth alignment system. An analysis method directly based on the convergence time of the fourth-order compass azimuth alignment system, the specific implementation steps are as follows:
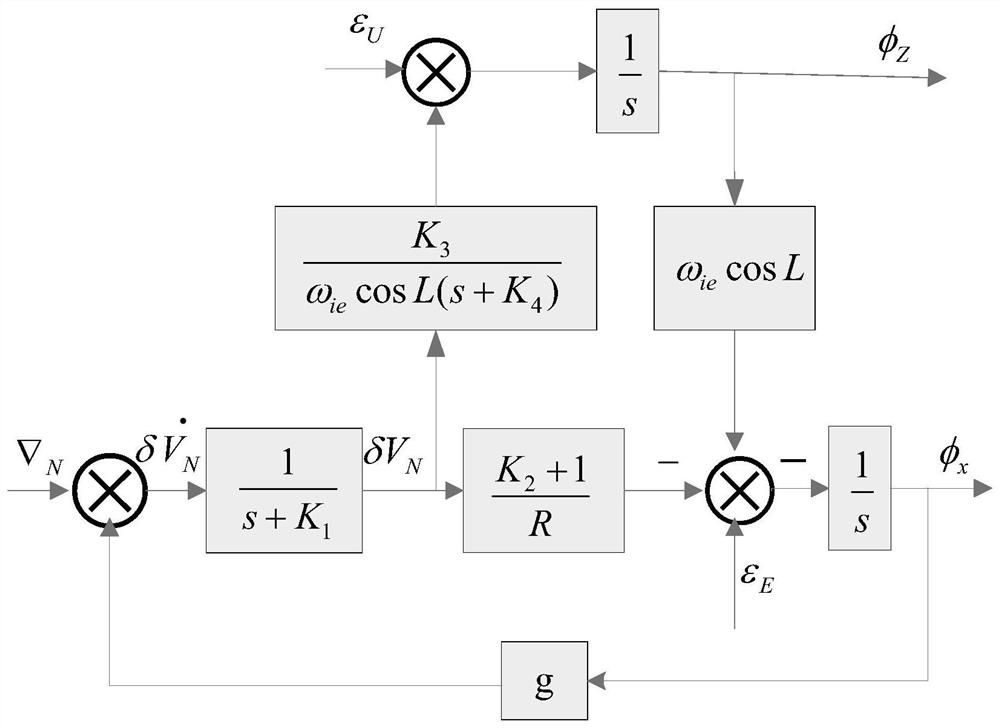
[0047] Step 1. Analyze the principle block diagram of the fourth-order compass azimuth alignment, and find out the systematic errors that affect the convergence time of the fourth-order compass azimuth alignment control system, including the eastward gyro constant drift and the initial azimuth error;
[0048] Step 2. According to the fourth-order compass azimuth alignment principle block diagram, obtain the azimuth error frequency domain response of the system error;
[0049]Step 3. Parameter setting, according to the precision of the inertial device and the initial azimuth error, set the compass azimuth alignment parameters, and the parameter setti...
Embodiment 2
[0087] The invention relates to a method for analyzing the convergence time of compass azimuth alignment, especially based on a fourth-order compass azimuth alignment system.
[0088] The inertial navigation system is a completely autonomous system, it does not rely on any information from the outside world, nor does it transmit any signals, it has a highly concealed, all-weather and global navigation capability. Inertial navigation systems have been widely used in many military and civil fields such as aviation, aerospace, navigation, etc., and have become a major navigation device currently used on various carriers. In order to ensure that the inertial navigation system can achieve high performance indicators, the initial alignment is one of the key technologies of the inertial navigation system, and the compass alignment is an autonomous initial alignment method using the compass effect and classical control theory. Compass alignment has the advantages of less design parame...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More