

Novel target used for point cloud registration, and extraction algorithm thereof
A new type of point cloud registration technology, applied in the field of 3D laser scanning measurement, can solve the problems of large stitching error of adjacent stations, increase of target center extraction error, loss of accuracy, etc., achieve flexible and simple layout, and improve registration Accuracy and the effect of less loss of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
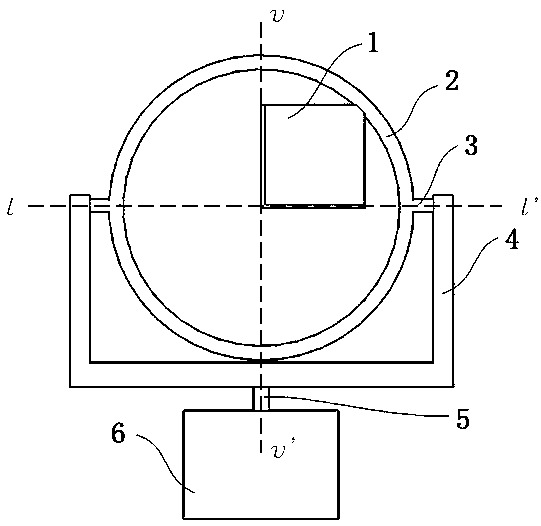
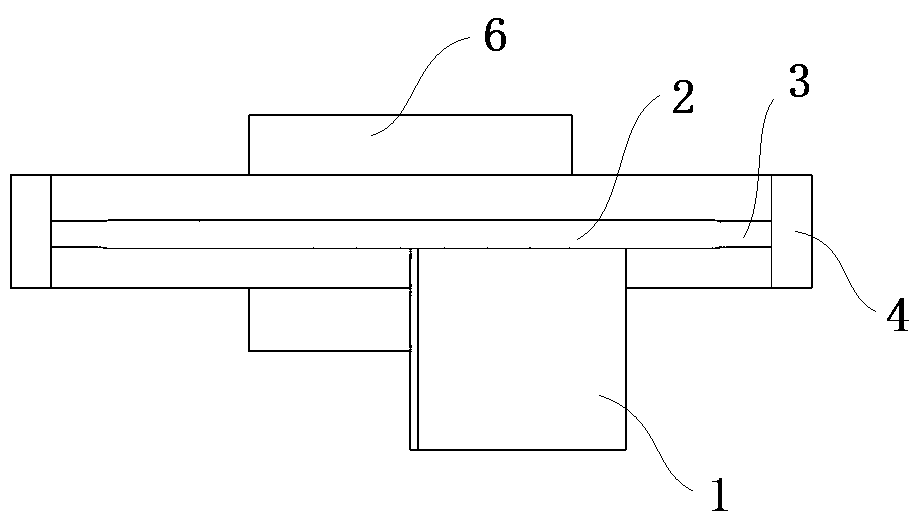
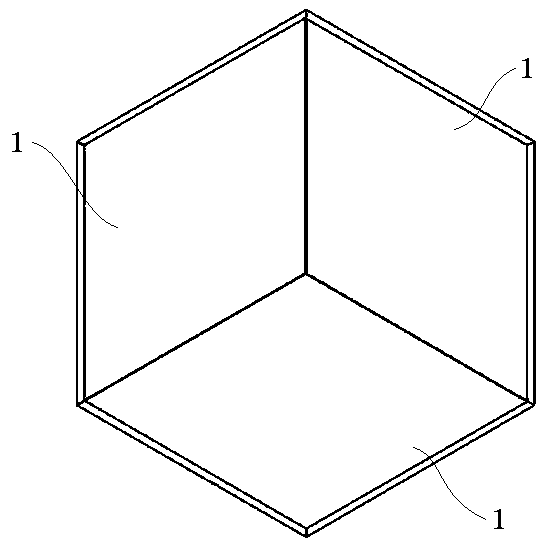
[0023] Embodiment 1: as Figure 1-3 As shown, this embodiment specifically relates to a new type of target for point cloud registration and its extraction algorithm. The new type of target is rotatably arranged on the circular bracket 2 by at least three reflectors 1, and The spatial position of the fixed intersection point of the reflector 1 remains unchanged during the rotation of the ring-shaped support 2; the new target extraction algorithm for point cloud registration performs plane fitting on the point cloud data, and then removes the excessive deviation For the abnormal point, finally obtain the fixed intersection point by combining the plane equations of the planes where the three reflectors 1 are located.
[0024] Such as Figure 1-3 As shown, the new target for point cloud registration includes at least three intersecting and fixed reflectors 1, and the reflective surface of the reflector 1 is coated with reflective materials, which can ensure clear and accurate rec...
Embodiment 2
[0035] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the intersection angles of the three reflectors 1 of the new target for point cloud registration are different. Specifically, one of the reflectors 1 in this embodiment It forms an angle of 0~30 degrees with the horizontal plane, while the angle between the other two reflectors 1 is greater than 90 degrees. It is also ensured that the fixed intersection point of the reflector 1 is still strictly located on the circular bracket 2, and it is connected with the connecting column 5 The intersection of the central axis of the central axis and the central axis of the support shaft 3 coincides to ensure that the spatial position of the fixed intersection is constant during rotation.
[0036] The beneficial effect of this embodiment is that the effective area of the new target scanned by the laser scanner can be increased, and the registration accuracy of the entire measurement area can be further im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More