

A system and method for detecting abnormal posture of human body based on three-dimensional vision
A detection method and three-dimensional vision technology, applied in the field of computer vision, can solve problems such as increasing the detection range of falls, and achieve the effects of ensuring accuracy and effectiveness, high fall recognition, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
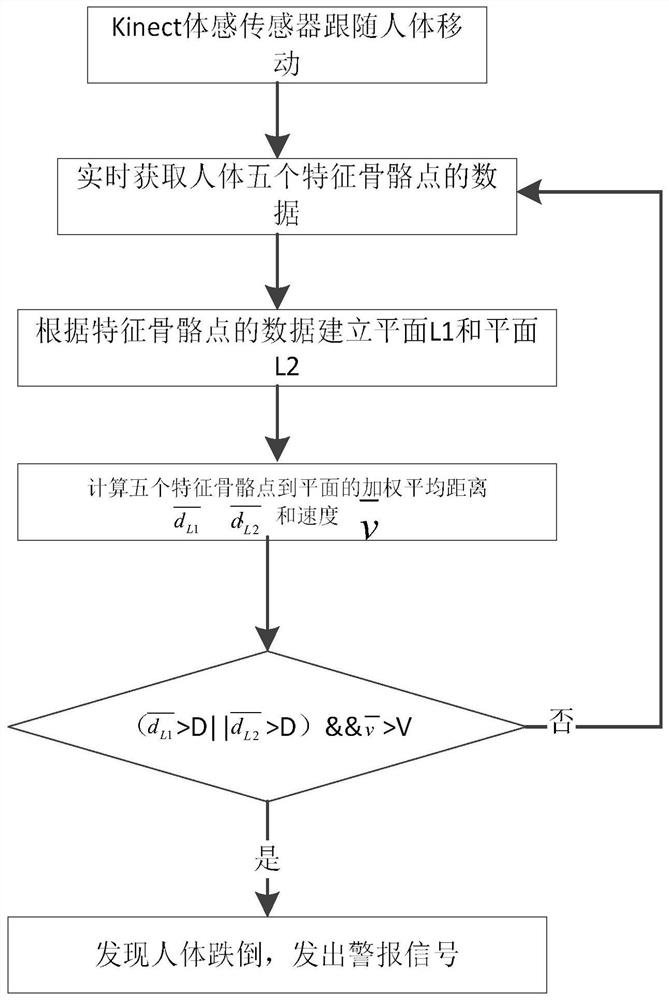
[0082]The method for detecting abnormal posture of a human body based on three-dimensional vision of the present invention is that the Kinect somatosensory sensor is mounted on a mobile platform, and the mobile platform adopts a Mecanum wheel as a moving wheel, so that the mobile platform equipped with the Kinect somatosensory sensor can move following the movement of the human body , and use the Kinect somatosensory sensor to obtain the distance from the mobile platform to the human bone point, convert the acquired distance change into an electrical signal and send it to the mobile platform, so that the mobile platform can move along with the moving direction of the human body, and the mobile platform can be controlled according to the distance change The moving speed of the Mecanum wheel ensures that the mobile platform maintains a set distance from the human body; at the same time, according to the pictures captured by the camera on the Kinect somatosensory sensor, the inform...
Embodiment example
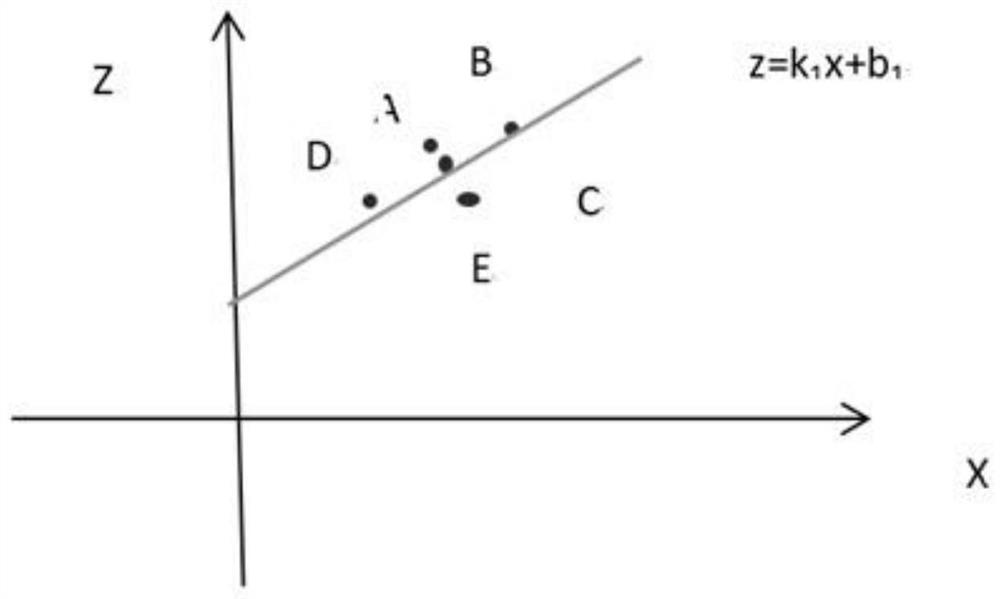
[0145] (1) Calculate the distance from the joint point to the plane: according to the extracted five feature key points and the two established planes L 1 and L 2 To calculate the distance from point to surface to determine the occurrence of falls.
[0146] The coordinates of the known point M (x M ,y M ,z M ) and the plane equation L: Ax+By+Cz+D=0, the distance formula from point M to plane L: First calculate the distance formula of the five bone feature points to the plane L1 respectively: Then calculate the distance formula of the five bone feature points to the plane L2 respectively:
[0147] For the Kinect somatosensory sensor, using the acquired five characteristic skeleton points, each frame of data will obtain five characteristic skeleton points to the plane L 1 and plane L 2 If the ten distance data are directly summed or averaged on the ten data, the obtained data is not very convincing and representative, and the error of the obtained data will be relativ...
Embodiment 3
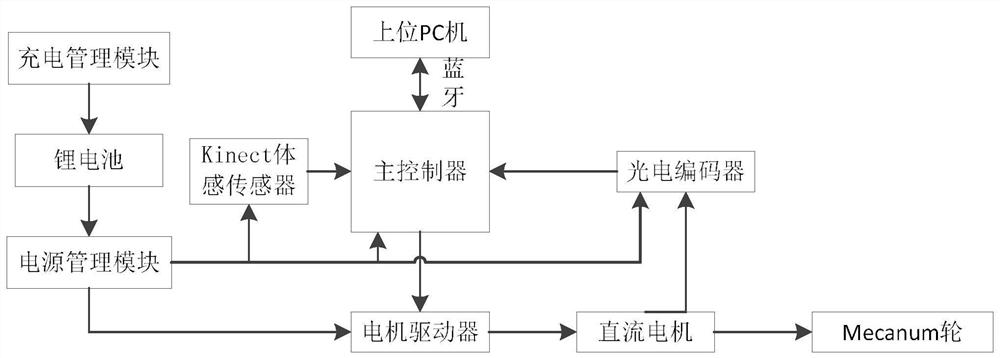
[0171] This embodiment is a human body abnormal posture detection system based on three-dimensional vision, which is used to realize the human body abnormal posture detection method based on three-dimensional vision in Embodiment 1, including a mobile platform, four mobile wheels are installed on the lower side of the mobile platform, and the mobile wheels adopt Mecanum wheel; the upper side of the mobile platform is equipped with a Kinect somatosensory sensor, and the Kinect somatosensory sensor is equipped with a Depth sensor. The Depth sensor uses the time reflected back by the infrared pulse projected by TOF (Time of Flight) technology to obtain the Depth data (and sensor) distance information). The Kinect somatosensory sensor is wirelessly connected to an upper PC, and the upper PC communicates with the mobile platform in a wireless communication manner through the serial port Bluetooth; the mobile platform is also equipped with a DC motor, a main controller, a lithium bat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More