

Legged jump robot based on piezoelectric drive and control method thereof
A technology of piezoelectric drive and control method, which is applied in the field of jumping robots to achieve the effect of expanding the application field and the range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Below in conjunction with accompanying drawing and specific embodiment the technical solution of the present invention is described in further detail:
[0034] This invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, components are exaggerated for clarity.
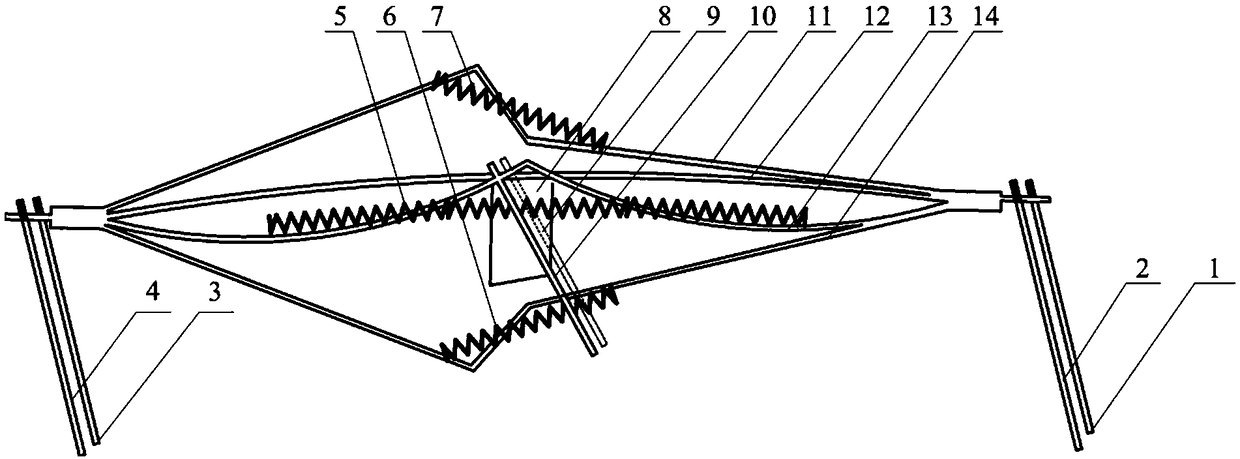
[0035] The legged jumping robot based on piezoelectric drive of the present invention includes first to fourth driving feet, first to fourth PVC film layers, first and second shape memory alloy springs, first and second bouncing legs, and a third spring And the stopper, wherein, the first to the fourth PVC film layers are arranged sequentially from top to bottom, there is a gap between the two, and the two ends are bonded to each other, and the bonding ends...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More