

Unmanned aerial vehicle anti-GPS spoofing system and method based on multisource information fusion
A multi-source information fusion and UAV technology, applied in the field of UAV anti-GPS spoofing system, can solve problems such as limitations and difficult application of algorithms, and achieve the effects of improving accuracy, ensuring anti-interference, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
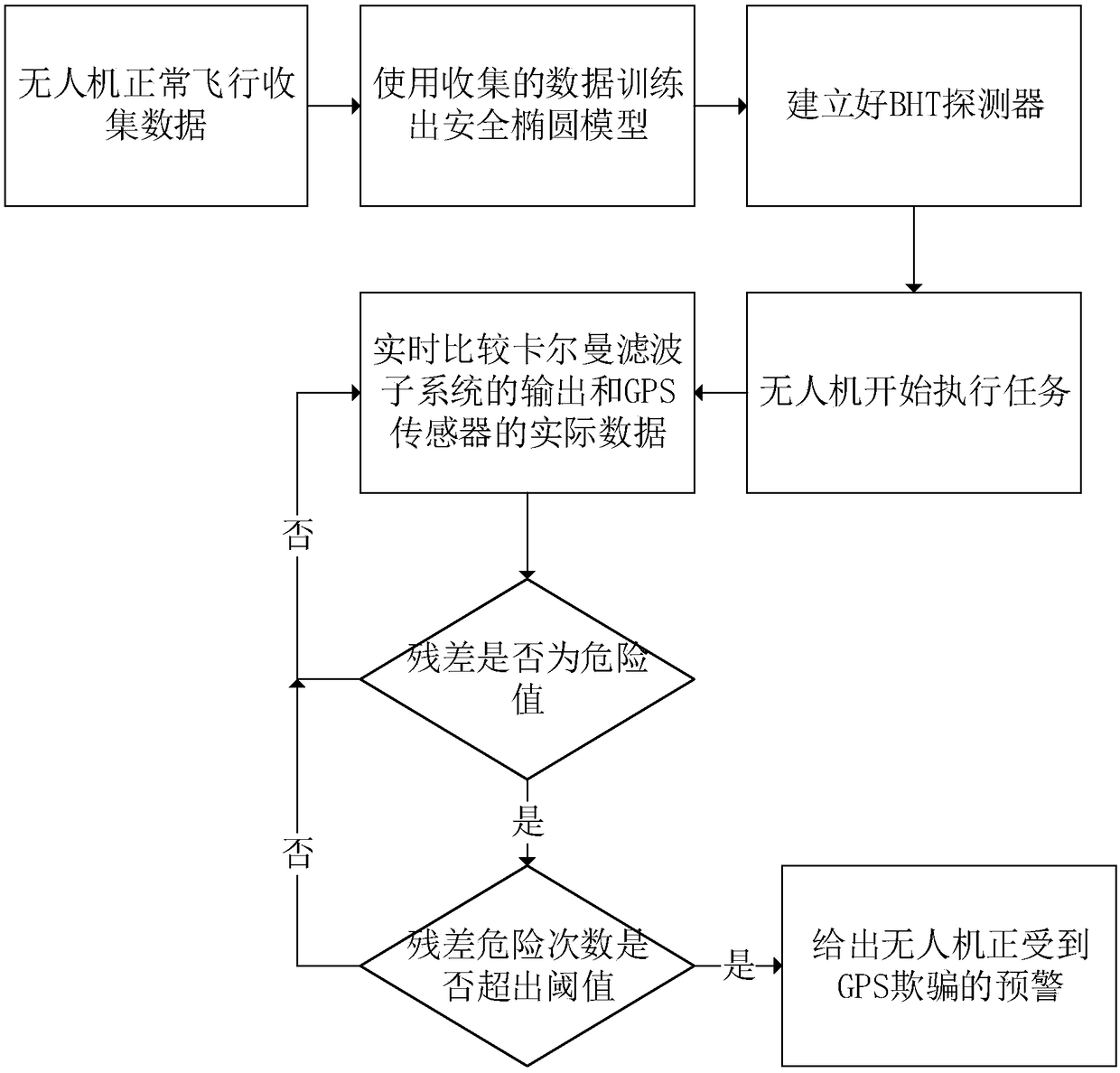
[0065] see figure 1 , the present invention is an anti-GPS spoofing system for UAVs based on multi-source information fusion, including a UAV sensor subsystem 1, a Kalman filter subsystem 2, and a GPS spoofing attack detection subsystem 3, and the sensor subsystem 1 includes a security The sensor 2 and the non-safety sensor 3, the safety sensor 2 and the non-safety sensor 3 are respectively connected with the GPS spoofing attack detection subsystem 3 through the Kalman filter subsystem 2, and the BHT detector is trained by combining the safety sensor 2 and the GPS sensor first, Then use the trained BHT detector to detect GPS spoofing attacks in real time. The BHT detector trained by this method has high stability and anti-interference ability to complex environments.
[0066] The safety sensor 2 is an inertial measurement unit (IMU), including a gyroscope and an acceleration sensor; the non-safety sensor 3 includes a GPS sensor, and the sensor subsystem 1 can collect the data ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More