

Path planning method for mobile robot
A mobile robot, path planning technology, applied in instruments, motor vehicles, non-electric variable control, etc., can solve problems such as excess energy loss and complex calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] Below with reference to the accompanying drawings, the specific embodiments of the present invention, such as the shape, structure, mutual position and connection relationship between each part, the role and working principle of each part, etc. will be further described in detail:
[0074] It should be noted that the diagrams provided in the following embodiments are only schematically illustrating the basic ideas of the present invention, and only the components related to the present invention are shown in the diagrams rather than the number, shape and shape of the components in actual implementation. Dimensional drawing, the type, quantity and proportion of each component can be changed arbitrarily during actual implementation, and the component layout type may also be more complicated.
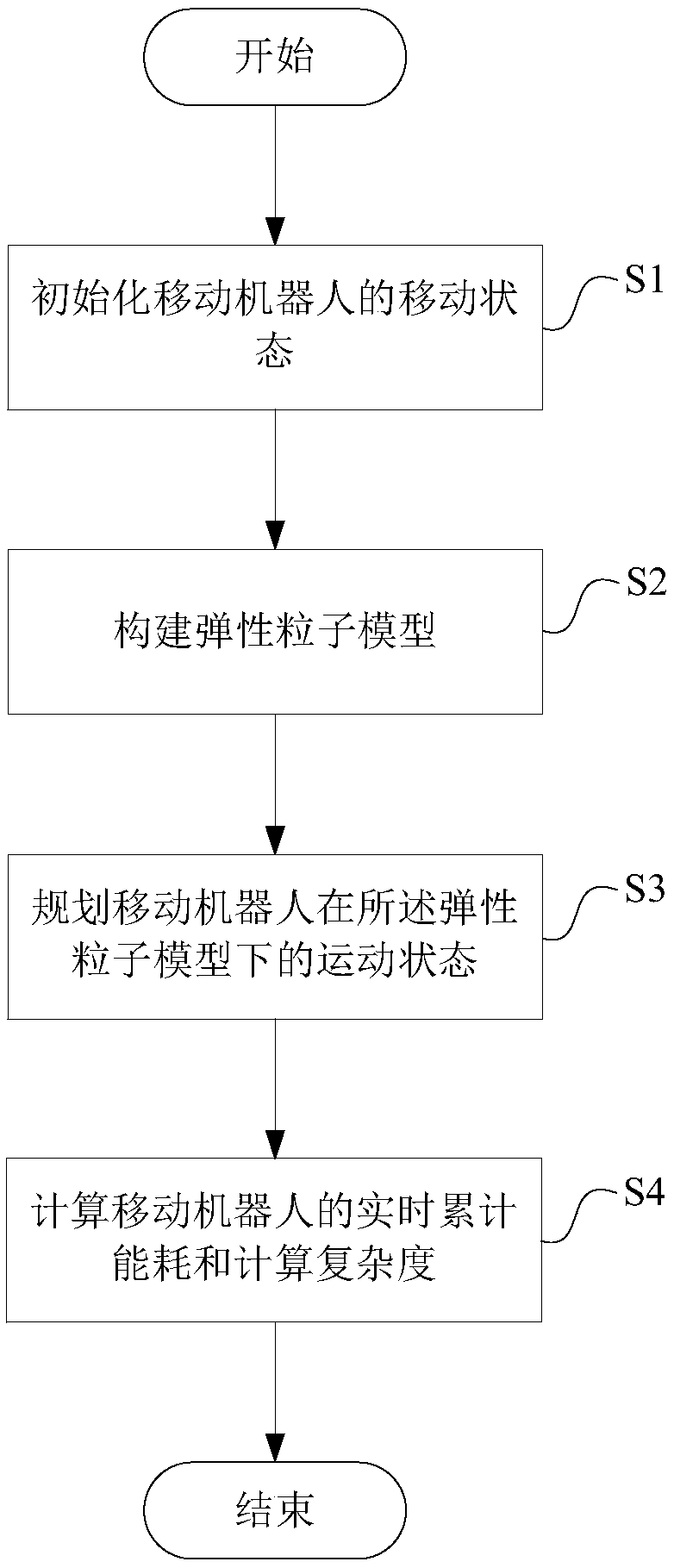
[0075] Such as figure 1 As shown, this embodiment provides a path planning method for a mobile robot, including the following steps:
[0076] S1. Initialize the mobile state of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More