Visual obstacle avoidance method based on distributed map for unmanned aerial vehicle
A UAV, distributed technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve problems such as UAV damage, time-consuming storage resources, obstacle damage, etc., to reduce the burden, The effect of improving processing efficiency and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
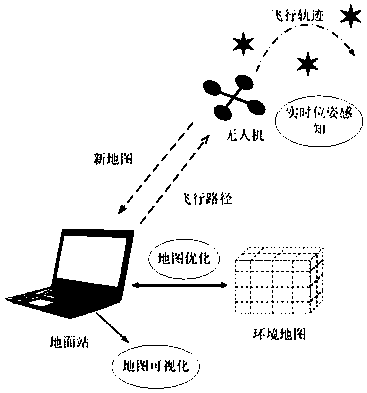
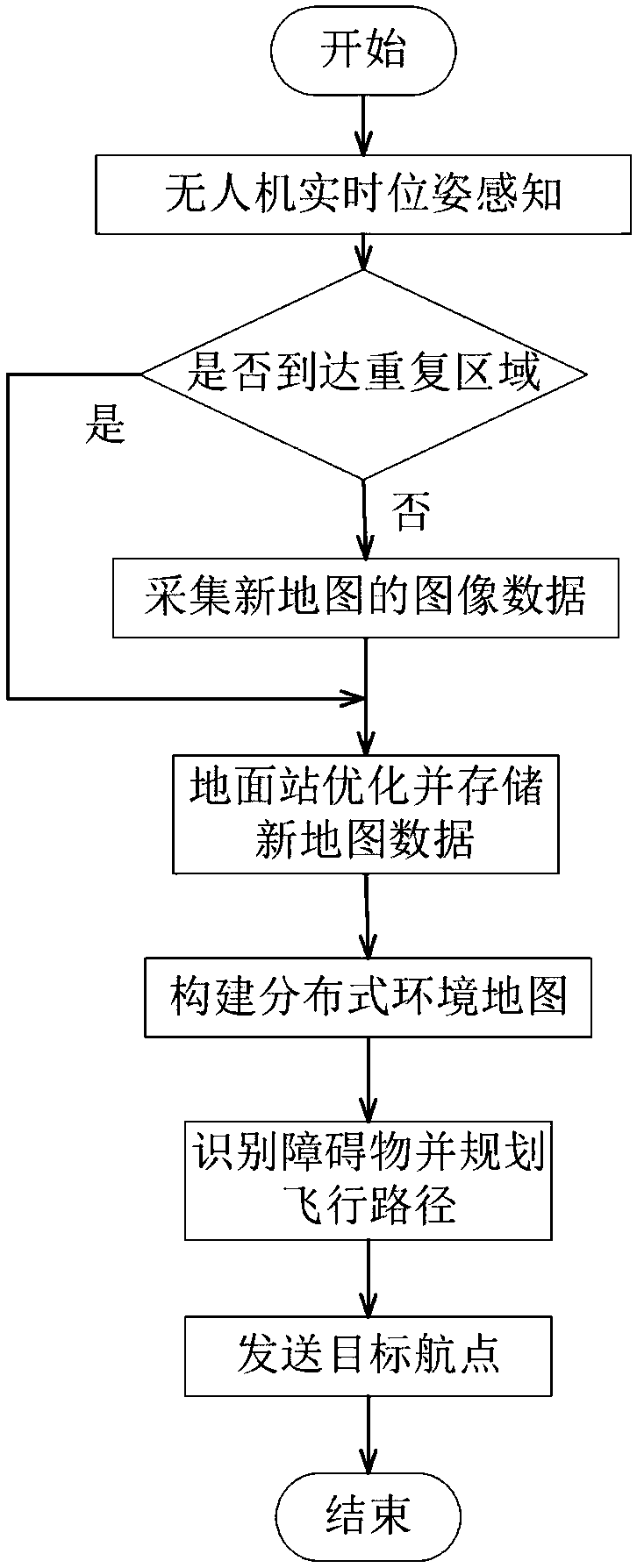
[0029] figure 1 It is a schematic diagram of the distributed map-based UAV visual obstacle avoidance method of the present invention. The system consists of two parts, the UAV and the ground station, which communicate through WiFi. The drone performs real-time pose perception to determine whether it has reached a repeated area. If it is judged to be an unreached area, the drone performs image data collection and related calculations, and the calculated point cloud 3D coordinate data and its own The flight status data is sent to the ground station, which is responsible for optimizing and storing these data, and constructing a distributed environment map through the processed data, then identifying obstacles in the new map and planning the flight path, and finally the ground station will plan the planned flight The command is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com