

Ferrying device for cleaning robot and cleaning robot system
A technology for cleaning robots and pushing devices, which is applied in the direction of manipulators, photovoltaic power generation, photovoltaic modules, etc., can solve the problems of position deviation, lack of limit devices, etc., and achieve the effects of easy control, cost saving, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
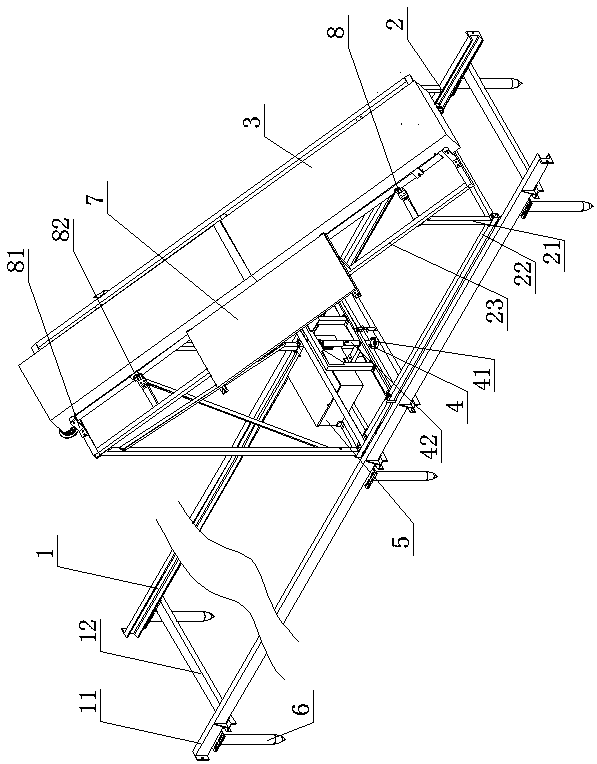
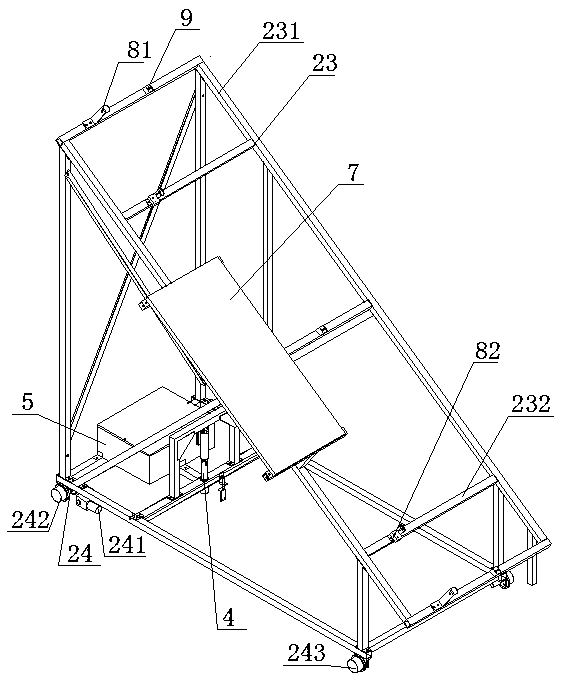
[0046] as attached Figure 1-4 As shown, the cleaning robot ferry device of the present invention includes an underframe, a support frame 21, a docking frame 23, a walking device 24, a ground track 1, a locking device 4, a transfer car body sensing device and a cleaning robot sensing device. The docking frame 23 is arranged on the top of the underframe 22 through the support frame 21, and the running gear 24 is arranged on the underframe 22. The above-mentioned underframe 22, the supporting frame 21, the docking frame 23 and the running gear 24 form the transfer car body 2; the ground track 1 Laid on the outside of the parallel photovoltaic panel arrays 13, for the traveling device 24 to move back and forth between the photovoltaic panel arrays 13; Whether to move to the corresponding photovoltaic panel array 13 ; the cleaning robot sensing device is arranged on the docking frame 23 for sensing whether the cleaning robot 3 moves to the docking frame 23 .
[0047] Wherein, the...
Embodiment 2
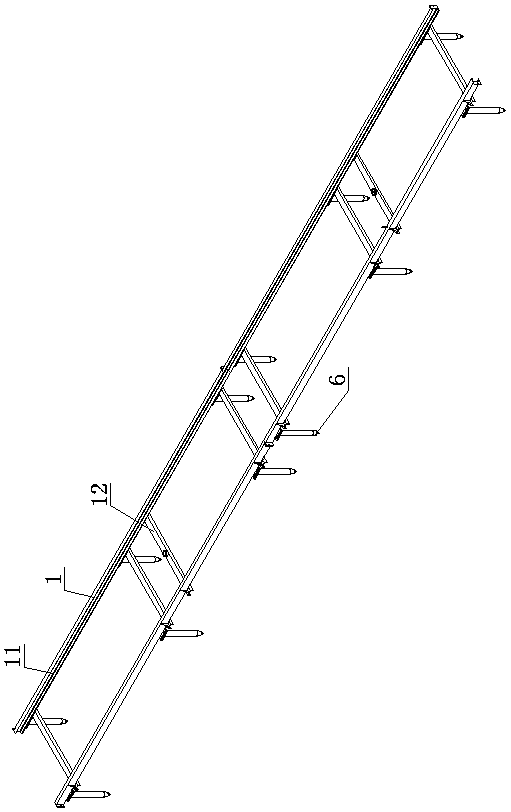
[0064] as attached Figure 5 As shown, this embodiment is a further improvement on the basis of Embodiment 1. The difference between this embodiment and Embodiment 1 is that it also includes a plurality of transition coupling frames 10, and the above multiple transition coupling frames 10 pass through the corresponding columns. Set above the ground track 1 in turn, each transition coupling frame 10 is arranged in parallel with the corresponding photovoltaic panel array 13 and connected to each other, and the docking frame 23 and the corresponding photovoltaic panel array 13 are connected to each other through the transition coupling frame 10. The cleaning robot 3 walks stably.
[0065] There is a one-to-one correspondence between the transition coupling frame 10 and the photovoltaic panel array 13 to be cleaned, and the number of transition coupling frames 10 is selected according to actual needs during installation. The transition coupling frame 10 is connected to the ground...
Embodiment 3
[0067] as attached Image 6 As shown, the cleaning robot system of the present invention includes the cleaning robot and the ferry device for the cleaning robot disclosed in Embodiment 2 of the embodiment.
[0068] The cleaning robot 3 includes a frame, a brush roller 31, a traveling mechanism, a driving device, a limit sensor 32, a speed sensor 39 and a robot electric control box 5, and a brush roller 31, which is rotatably arranged on A side end of the frame, the running mechanism is arranged on the frame, the driving device is arranged on the frame and is connected with the brush roller 31 and the running mechanism respectively, and the limit sensor 32 is arranged on a side end of the frame and connected with the brush On the same side of the roller 31, the speed sensor 39 is arranged on the traveling mechanism, and the robot electric control box 5 is arranged on the frame and is connected with the driving device, the limit sensor 32 and the speed sensor 39 respectively.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More