

Kinematics-based five-axis numerical control machining tool attitude planning method
A technology for machining tools and kinematics is applied in the field of kinematics-based five-axis CNC machining tool attitude planning, which can solve the problems of difficult control and low attitude planning accuracy, and achieve the effects of reducing interference, preventing accidents and improving processing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
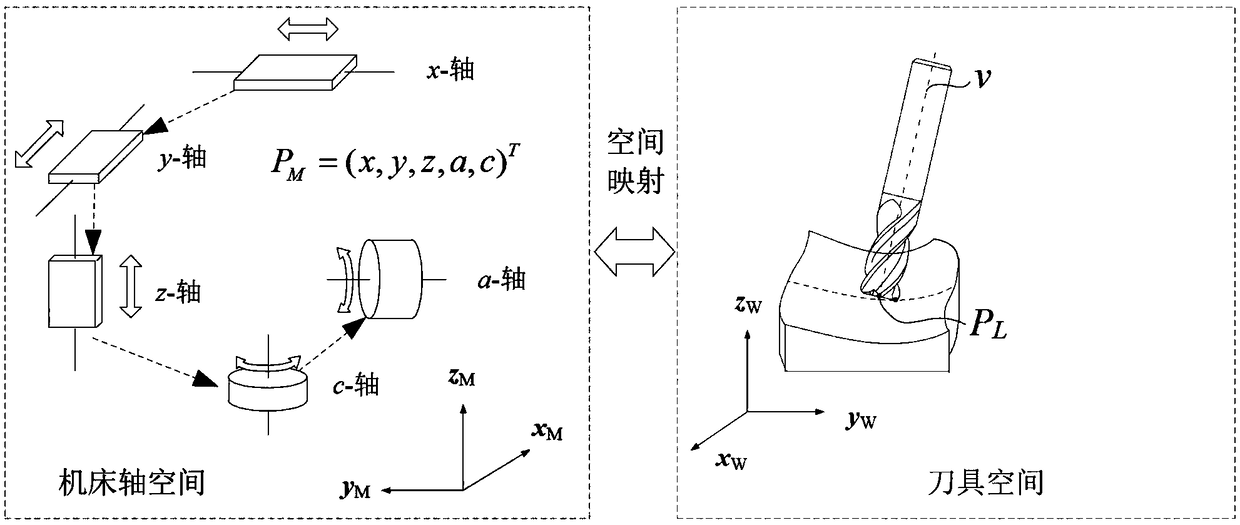
[0046] In this paper, the tool axis vector is defined as the vector description of the tool axis direction in the workpiece coordinate system. The tool axis vector is defined as the vector description of the tool axis direction in the workpiece coordinate system, and the tool position point P on the same tool path is used L,i Tool axis vector v i The adjacent tool point P L,i-1 and P L,i+1 Tool axis vector v i-1 and v i+1 The change of the vector is used as the measure of the vector description. Specifically, the sum of the squares of the angles between adjacent tool axis vectors and then the square root is used as the measure index. The above measure index Δv 1That is to say, it is the measure index of tool axis vector smoothness;
[0047]
[0048] In the formula (1), i represents the tool position point sequence on the same tool path in the tool position file, N L It is the total number of tool positions on the same tool path.
[0049] The prior art shows that larg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More