

Positioning and tracking system based on robot
A positioning tracking and robot technology, applied in the field of robot-based positioning tracking system, can solve the problems of unable to monitor positioning tracking information in real time, achieve the effect of increasing the ability to receive external information, convenient installation and setting, and convenient later maintenance and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with accompanying drawing.
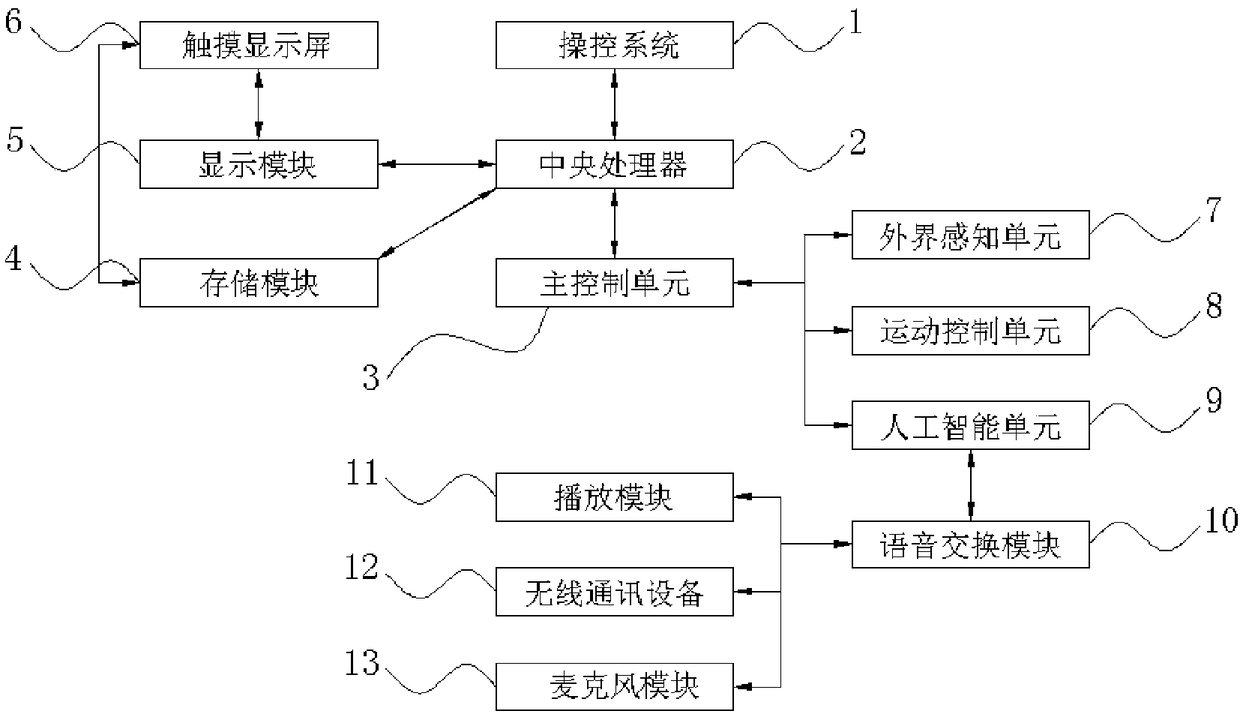
[0036] The present invention provides such as Figure 1-4 A robot-based positioning and tracking system shown includes an operating system 1, a central processing unit 2, a main control unit 3, a storage module 4, a display module 5 and a touch display screen 6;
[0037] The main control unit 3 includes an external perception unit 7, a motion control unit 8 and an artificial intelligence unit 9;
[0038] The operating system 1 is used to issue operating instructions to the central processing unit 2, and the touch display screen 6 regulates the operating system 1 through the display module 5 and the central processing unit 2;
[0039] The touch display screen 6 is used to receive the information transmitted by the central processing unit 2 and the storage module 4, and display the received information in real time;
[0040] The main control unit 3 is used to receive the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More