

Human pose estimation based on deformation convolution
A technology of human body posture and convolution, applied in the fields of computer vision and pattern recognition, can solve the problems of unrobust estimation performance, immature, and no optimization of estimation results, etc., and achieve simple biased convolution graphs, increased accuracy, and easy operation simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
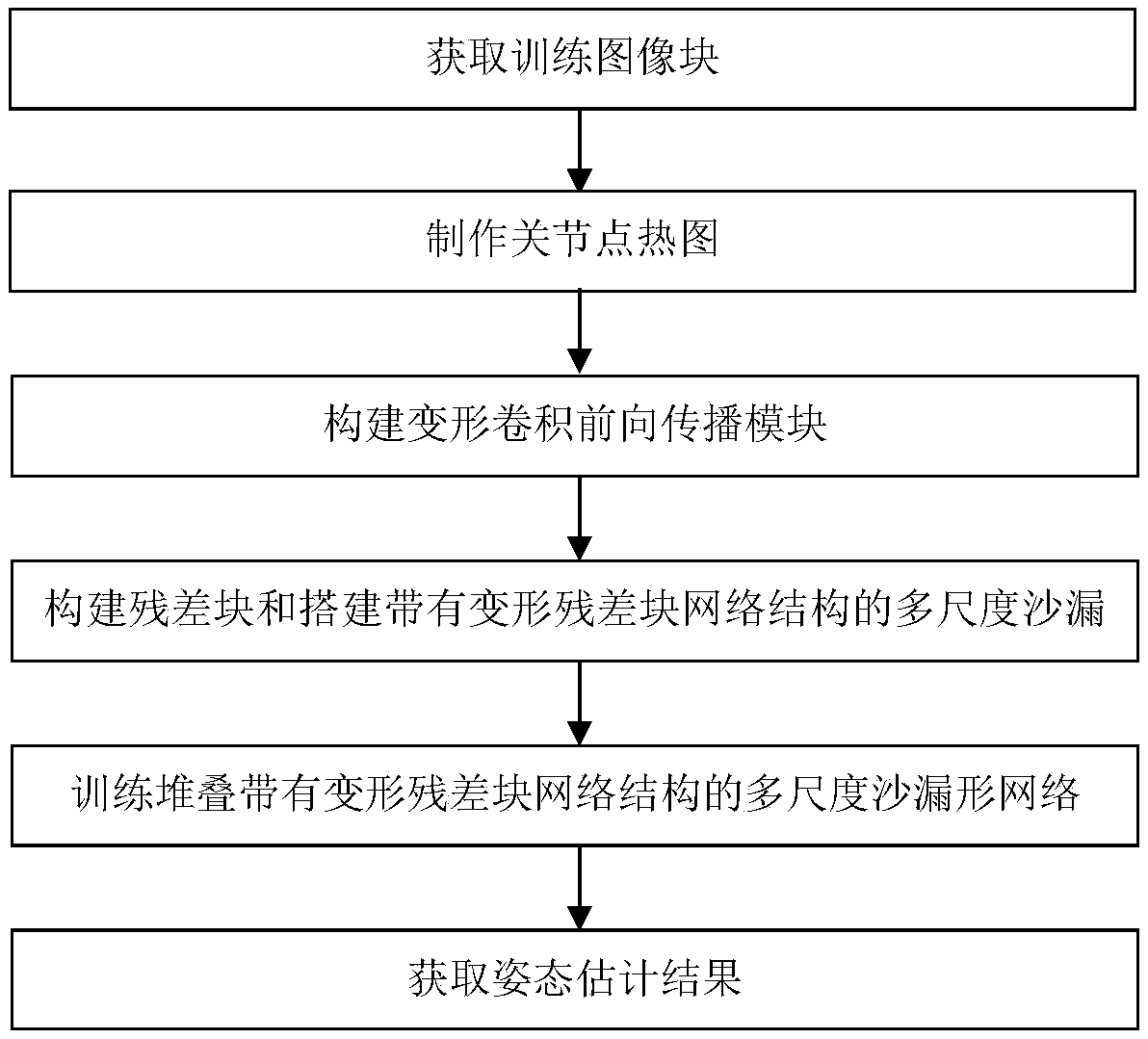
[0045] In complex scenes, the posture of the human body is special or the limbs are distorted. Due to the influence of light refraction or reflection due to environmental reasons, when the scale of the human body in the image changes greatly, the estimation is not accurate enough, and the estimation performance is not robust and immature. Unable to reach app level. The present invention conducts research in view of these current situations, and proposes a human body pose estimation method based on deformed convolution, see figure 1 , including the following steps:
[0046] (1) Get training images:
[0047] (1a) Use the target detection network Mask RCNN to detect images containing people, detect people targets, separate the individuals, and return the bounding boxes of the individual images.
[0048] (1b) Crop the bounding box to obtain the individual image of the person, fill it with constant values around the image to make it a square image, use it as a training image an...
Embodiment 2
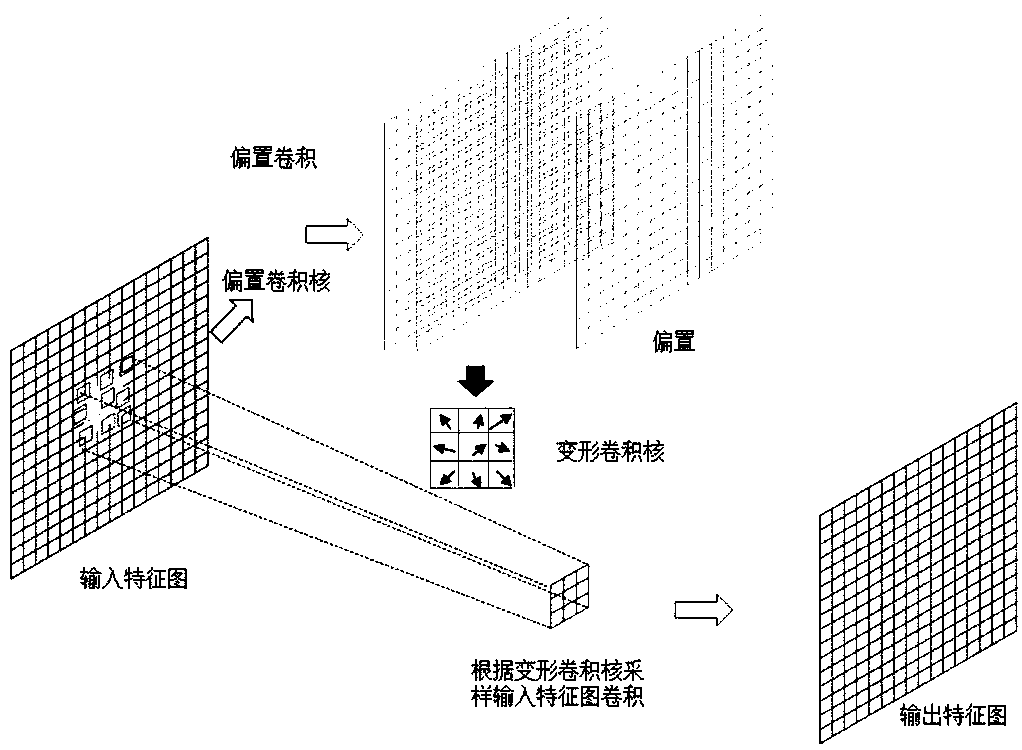
[0065] The human body pose estimation method based on deformed convolution is the same as that of Embodiment 1. The deformed convolution module of the deformed convolution kernel described in step 3, and its forward propagation steps are as follows:
[0066] 3.1. Input the input feature map of the deformed convolution module of the deformed convolution kernel into the bias convolution, and obtain the convolution kernel sampling bias feature map output by the bias convolution. The size of the convolution kernel sampling bias feature map should be set is H×W, where H and W are the height and width of the output feature map, respectively, and the number of channels for the bias feature map should be set to 2 k 2 ·n c , where k is the edge length of the convolution kernel, n c is the number of input channels, the bias feature map contains the bias Δp for the two axes corresponding to the sample points in each convolution kernel on the feature map in each channel of the input n ....
Embodiment 3
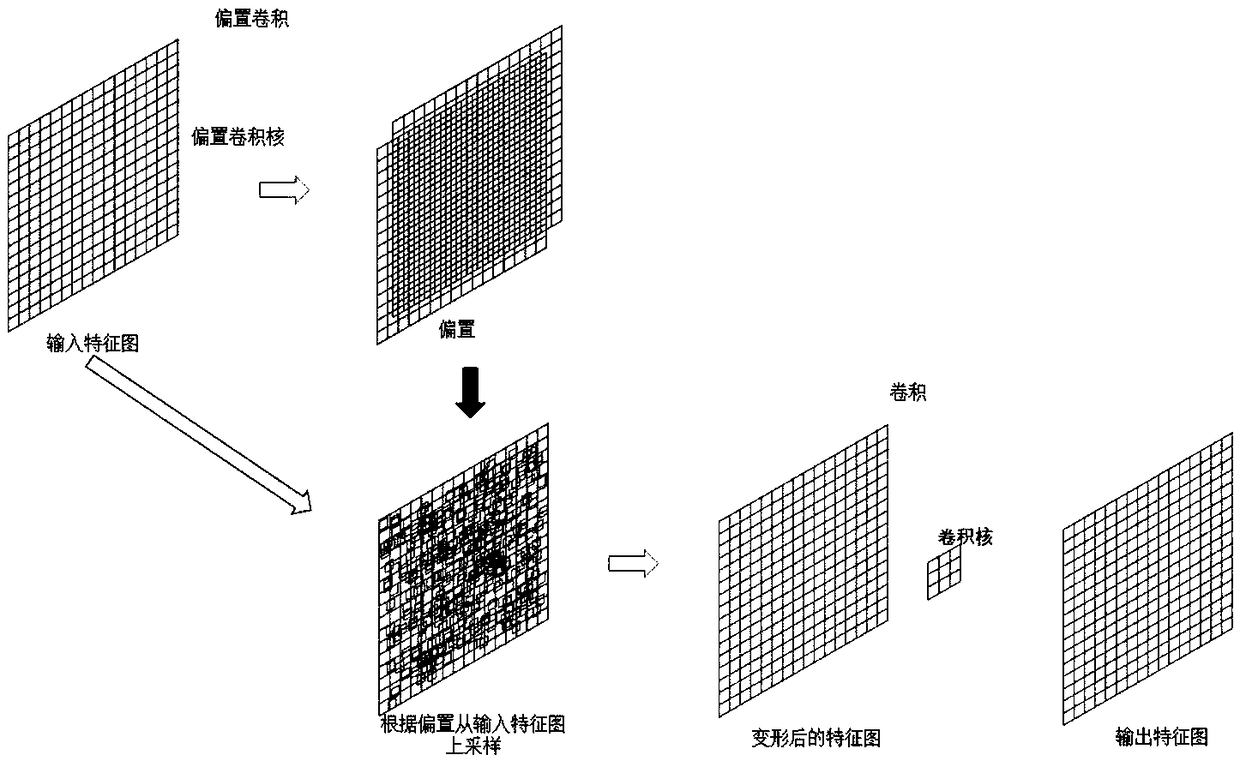
[0077] The human body pose estimation method based on deformed convolution is the same as that of Embodiment 1-2. The deformed convolution module of the deformed feature map described in step 3, and its forward propagation steps are as follows:
[0078] 3.3. Input the input feature map of the deformed convolution module of the deformed feature map into the bias convolution, and obtain the bias feature map of the input feature map output by the bias convolution. The size of the bias feature map of the input feature map should be set to is H×W, where H and W are the height and width of the input feature map, respectively, and the number of channels in the bias feature map should be set to 2n c , n c is the number of input channels, the bias feature map contains the bias Δp for the two axes of each point on the input feature map in each channel 0 ;
[0079] 3.4, the bias Δp in the bias feature map according to the input feature map 0 Get the deformed convolution output y, in p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More