

Fuzzy control method and device for balancing robot and balancing robot
A technology of fuzzy control and balance control, which is applied in attitude control, non-electric variable control, control/regulation system, etc., and can solve the problems that single-valued fuzzers cannot achieve performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
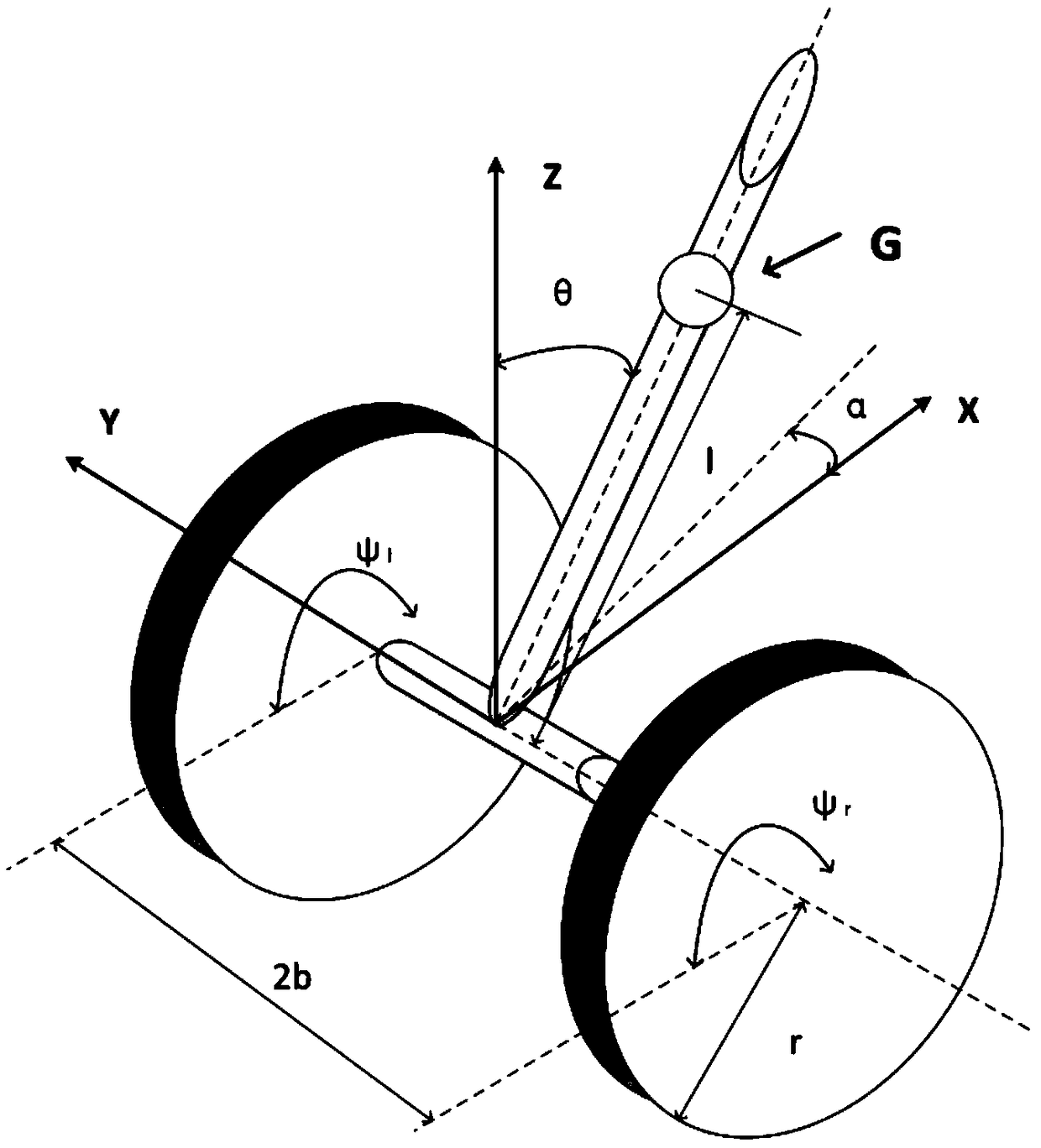
[0073] figure 1 A schematic structural diagram of a balancing robot provided by an embodiment of the present invention is shown. The meanings of the parameters and variables of the balance robot are shown in the table below:
[0074]
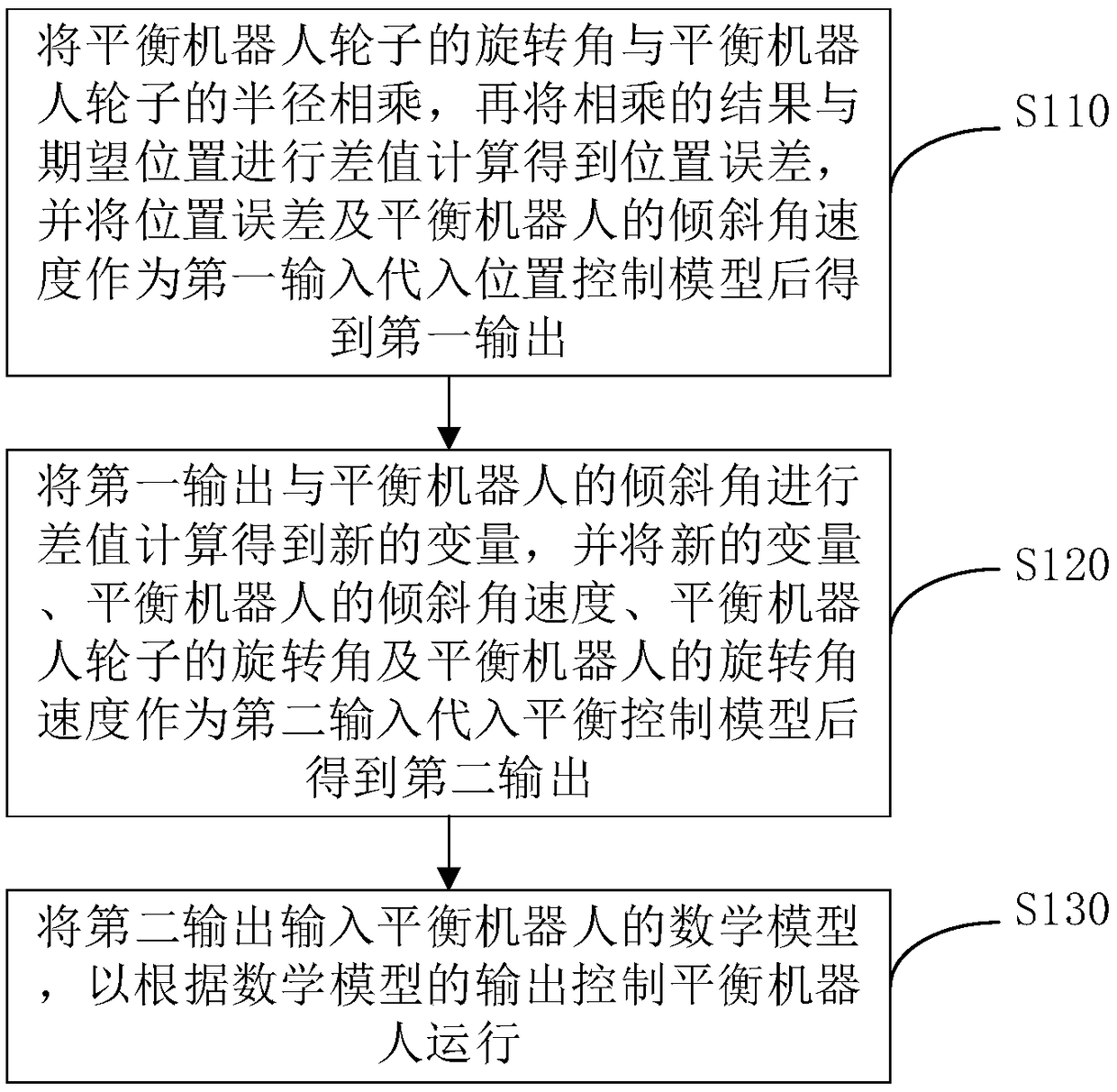
[0075] figure 2 A schematic flowchart of a fuzzy control method for a balancing robot provided by an embodiment of the present invention is shown.
[0076] The fuzzy control method of this balancing robot comprises the following steps:
[0077] In step S110, the rotation angle of the balance robot wheel is multiplied by the radius of the balance robot wheel, and then the difference between the multiplied result and the expected position is calculated to obtain the position error, and the position error and the tilt angular velocity of the balance robot are used as the first An input is substituted into the position control model to obtain the first output.
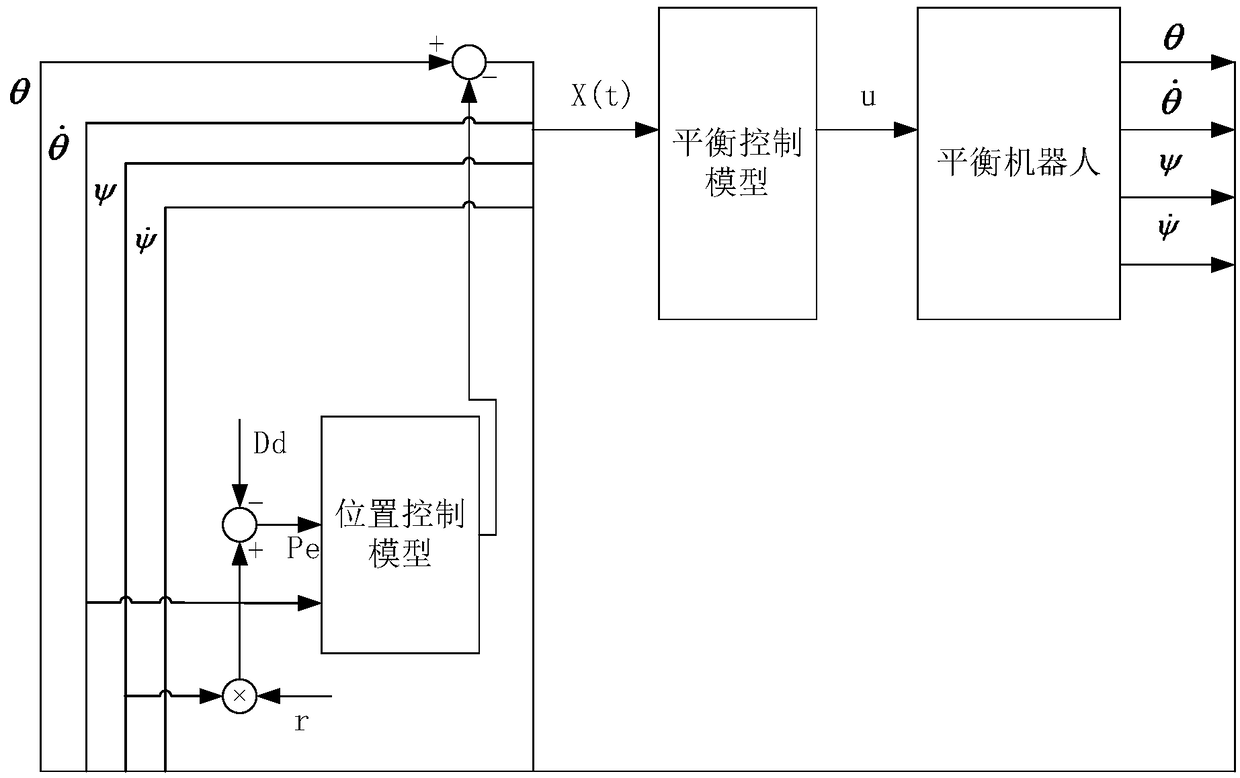
[0078] like image 3 As shown, let the state quantity of the balanced robot i...
Embodiment 2
[0181] Figure 4 A schematic structural diagram of a fuzzy control device for a balancing robot provided by an embodiment of the present invention is shown. The fuzzy control device 500 of the balancing robot corresponds to the fuzzy control method of the balancing robot in Embodiment 1. The fuzzy control method of the balancing robot in Embodiment 1 is also applicable to the fuzzy control device 500 of the balancing robot, which is not repeated here. Repeat.
[0182] The fuzzy control device 500 of the balance robot includes a first output module 510 , a second output module 520 and a control module 530 .
[0183] The first output module 510 is used to multiply the rotation angle of the wheel of the balancing robot by the radius of the wheel of the balancing robot, and then calculate the difference between the multiplied result and the desired position to obtain the position error, and calculate the position error and The inclination angular velocity of the balancing robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More