Robust lane detection method based on dynamic region of interest
A lane line detection and area of interest technology, applied in the field of intelligent driving and ADAS intelligent assisted driving system, can solve the problems of low robustness, poor real-time performance, low visibility, etc., to improve algorithm accuracy, reduce requirements, and robustness The effect of tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
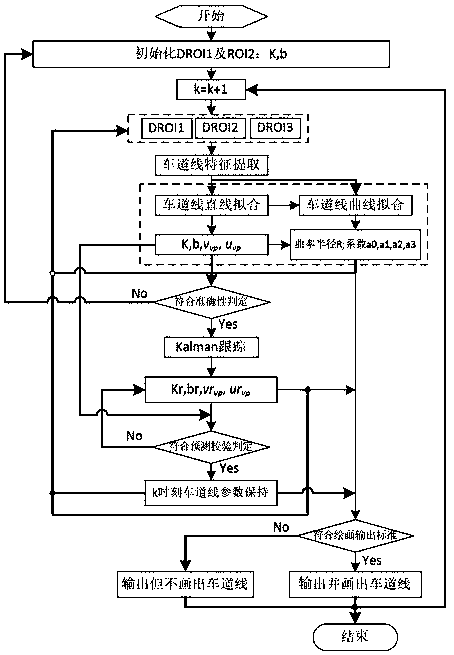
[0051] A robust lane line detection method based on dynamic regions of interest, such as figure 1 shown. attached figure 1 Introduce an overall flow process of the present invention, comprising the following steps:
[0052] S10. Obtain the image data to be recognized in the current frame, and initialize the area of interest of the lane. During the initialization process, during the initialization of the area of interest of the lane line, the initial detection area of the image preprocessing is based on the line width of the lane line, the solid line of the lane line, and the dashed line. The type and the distribution characteristics of the straight line and curve of the lane line are determined.
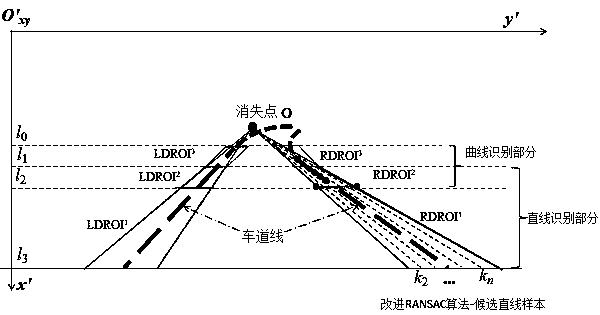
[0053] S20, such as figure 2 As shown, in order to identify dynamic ROIs more accurately, firstly, the ROI of the lane line in the current frame is divided into connected first area DROI1 , second area DROI2 and third area DROI3 from near to far. It can be understood that,...
Embodiment 2
[0077] As an optimization of embodiment 1, the difference between this embodiment and embodiment 1 is that in order to verify the accuracy of the calculated lane lines, this embodiment also includes the following sub-steps before performing step S40: judging the solved lane lines, Whether the vanishing point and the mean value of the curve radius meet all the following conditions, if the conditions are met, output the relevant parameters and perform Kalman filter prediction calculation; if not, do not output, and return to step S10 to process the next frame of image.
[0078] Specific conditions include:
[0079] 1) Judging that in the fitted lane line, the slope product of the fitted straight lines on both sides of the lane is less than 0, and determine whether the fitted lane line conforms to a typical trapezoidal shape. If the slope product of the left and right lane lines is greater than 0, it obviously does not conform to the image recognition. lane line characteristics. ...
Embodiment 3
[0083] As an optimization of Embodiment 1, the difference between this embodiment and Embodiment 2 is that in order to prevent the painted lane line from “flying” or obviously not fitting the actual lane line, in this implementation, in step S30, the drawn lane line is Verification steps are also included before the joint lane line:
[0084] S321. Determine whether the distance between the predicted vanishing point of the next frame and the vanishing point of the current frame is smaller than the fourth threshold, if so, execute step S322, otherwise output the result but do not execute the lane line drawing step;
[0085] S322. Judging whether the mean values of the curvature radii of the current frame are greater than the fifth threshold, if so, output the result and execute the lane line drawing step, otherwise output the result but not execute the lane line drawing step.
[0086] Wherein, the fourth threshold is judged according to the image pixel distance, and the fifth ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com