

SLAM-based plane polygon object measurement method and machine-readable storage medium
A measurement method and polygon technology, applied in the field of photogrammetry, can solve the problems of complex quadrilateral vertex process, high requirements for use environment, unfavorable real-time measurement, etc., to achieve a good AR experience, meet detection requirements, and improve the effect of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
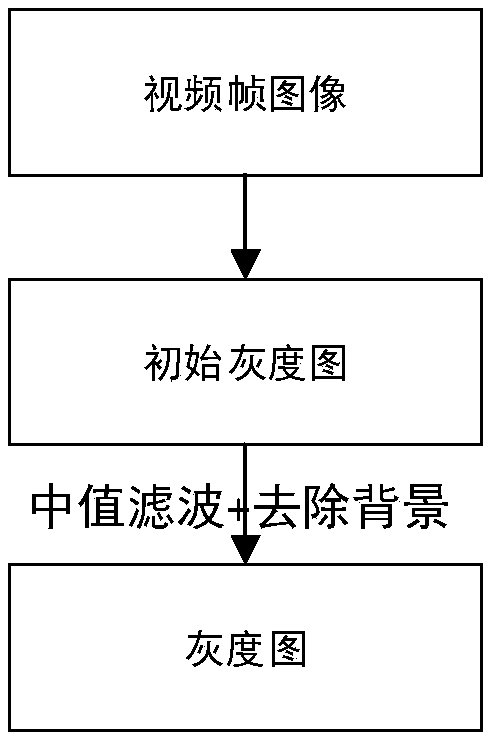
[0056] A SLAM-based planar polygonal object measurement method, V-SLAM calculates the orientation of the camera in an unknown environment through the captured video information, and constructs an environmental map at the same time. In real-time video information, if you want to measure a plane polygonal object, you must first identify it and extract the vertex position information of the polygon, which specifically includes the following steps:
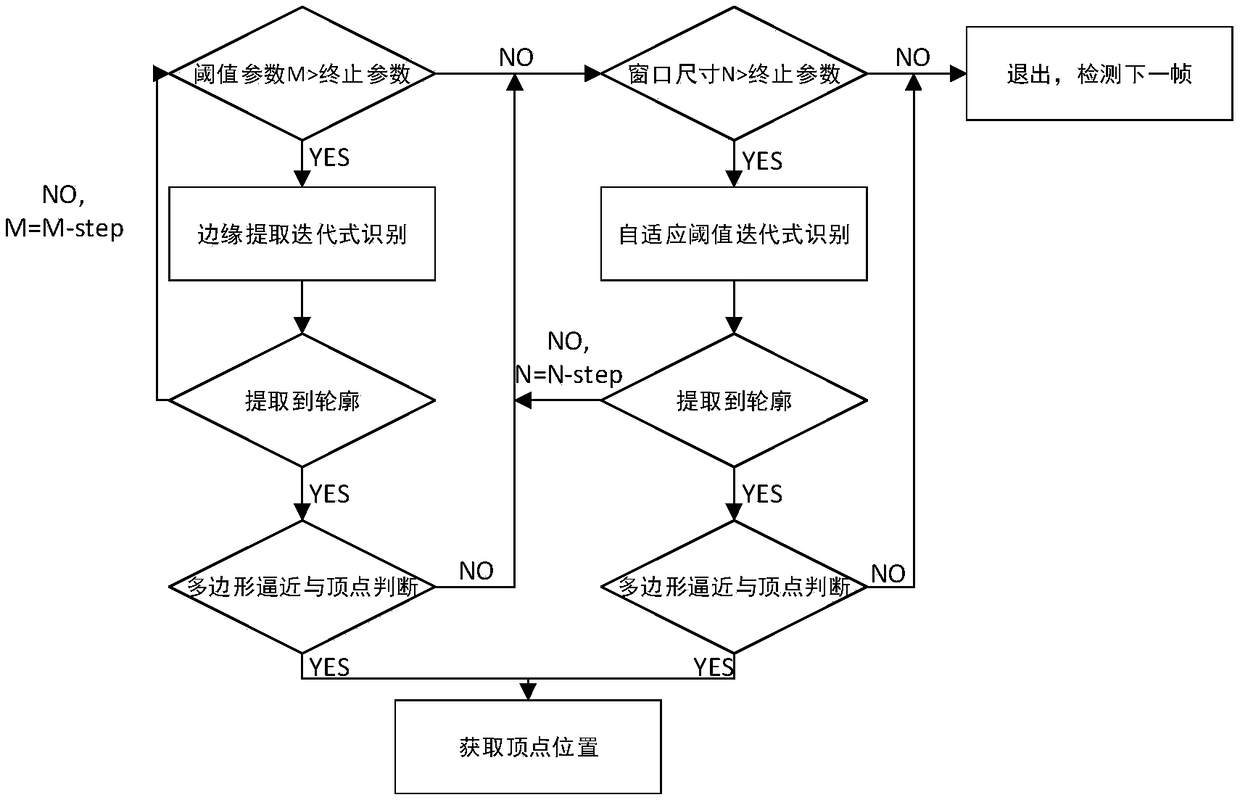
[0057] In the initialization of this embodiment, first set the number of vertices or the range of the number of vertices of the polygon to be detected. The range of the number of vertices set in this embodiment is 3-6, which can meet most of the measurement needs in life , and by limiting the range, it is possible to filter out the situation that there are too many inaccurate vertices in the contour extraction after the next contour extraction; if there is only a detection requirement for a certain polygon (such as a triangle or a quad...
Embodiment 2
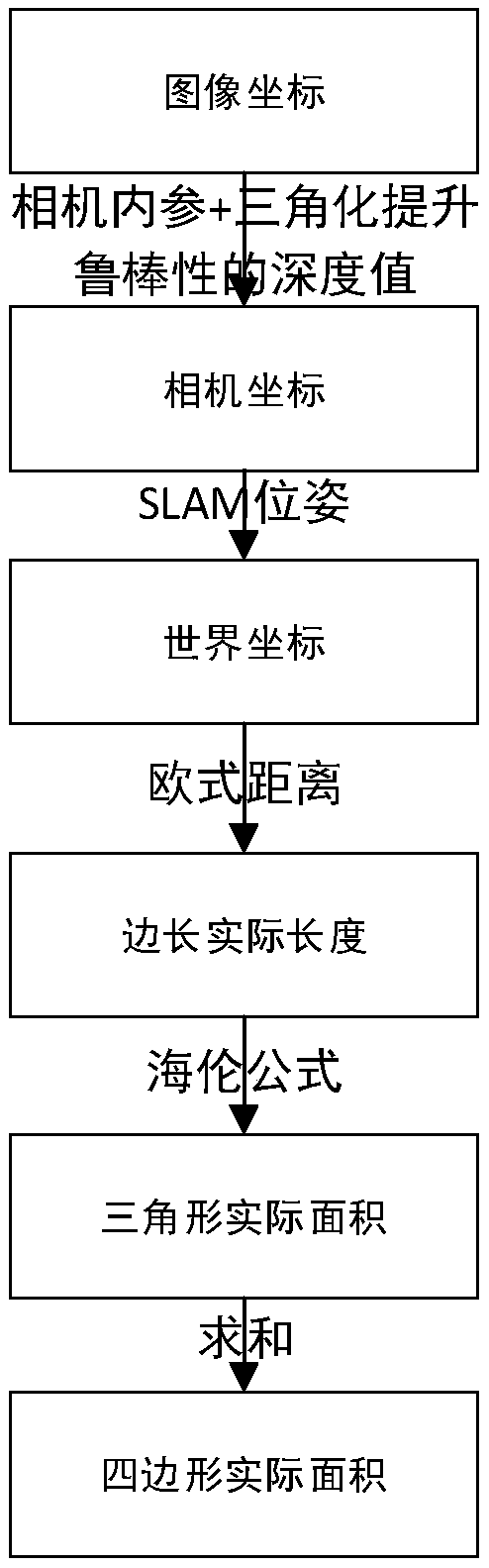
[0101] This embodiment is basically the same as Embodiment 1, except that in step (5), the forwarding method of transforming the coordinates of each vertex in the image coordinate system into the coordinates in the camera coordinate system adopts a triangulation method.
[0102] In this embodiment, when the depth information is unknown, for example, the depth camera is not used from the beginning of step (1) or the depth camera is used, but the depth information provided by the depth camera has obvious errors or the shooting object exceeds the range of depth information that the depth camera can recognize When , step (5) enhances the robustness of depth information through triangulation.
[0103] In addition, when a machine first uses a depth camera for measurement or a suspected depth camera failure, the triangulation calculation method can also be used to calculate the depth information of the vertices and compare it with the depth information provided by the depth camera to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More