

A method for predict a path and distance traveling along a plane base on a plurality of camera lenses
A travel path, camera technology, applied in the field of pattern recognition to compensate for jitter and instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
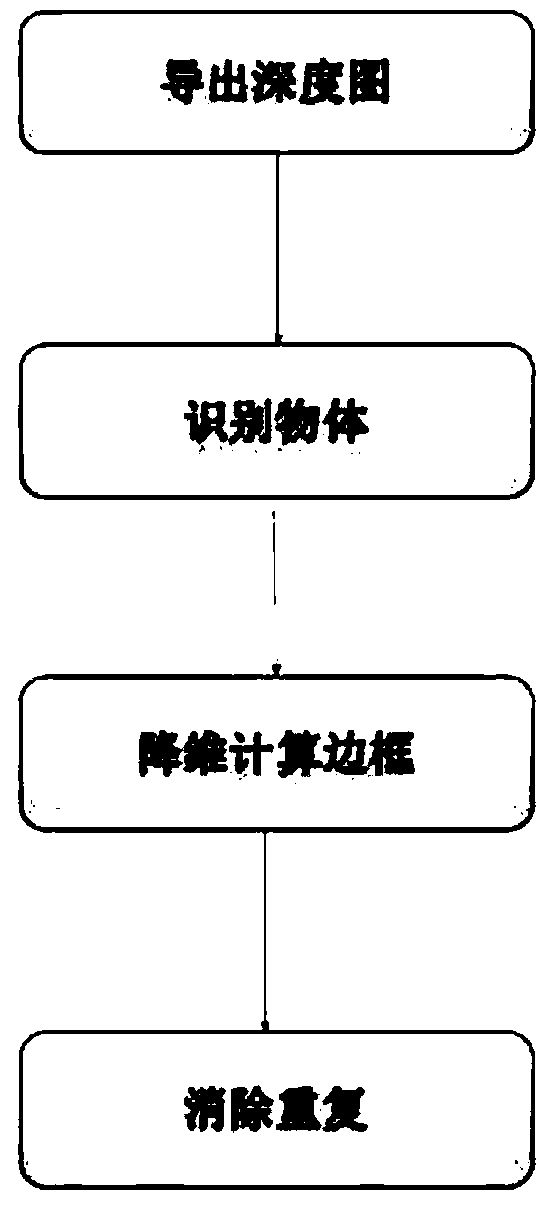
[0021] Such as figure 1 As shown, a method for estimating the path and distance along a plane based on multiple camera lenses includes the following steps:
[0022] (1) Export the depth map of each camera's three-dimensional coordinate mapping;
[0023] (2) Find out the target object that needs to be observed in each camera;
[0024] (3) For each found target problem, calculate the bounding box and use the depth map to map the point at the center of its lower edge to the underlying 2-D plane;
[0025] (4) Eliminate duplicate target objects to obtain a complete location list.
[0026] In step (1), exporting the depth map of each camera's three-dimensional coordinate mapping specifically includes the following steps:
[0027] (11) A known object is continuously moved within the camera view and its distance is calculated based on its size until all parts of the viewport have been mapped;
[0028] (12) Depth maps are simply preprogrammed when known when the camera is pointed a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More