Mode reconstructed minimally invasive surgical robot slave hand system
A technology of minimally invasive surgery and pattern reconstruction, applied in surgical manipulators, surgical robots, etc., can solve the problems of complicated operating space constraints, minimally invasive surgical robots that cannot fully adapt to the surgical field, and different environmental requirements, and achieve flexible layout and shape The effect of being stable and occupying less space in the operating room
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
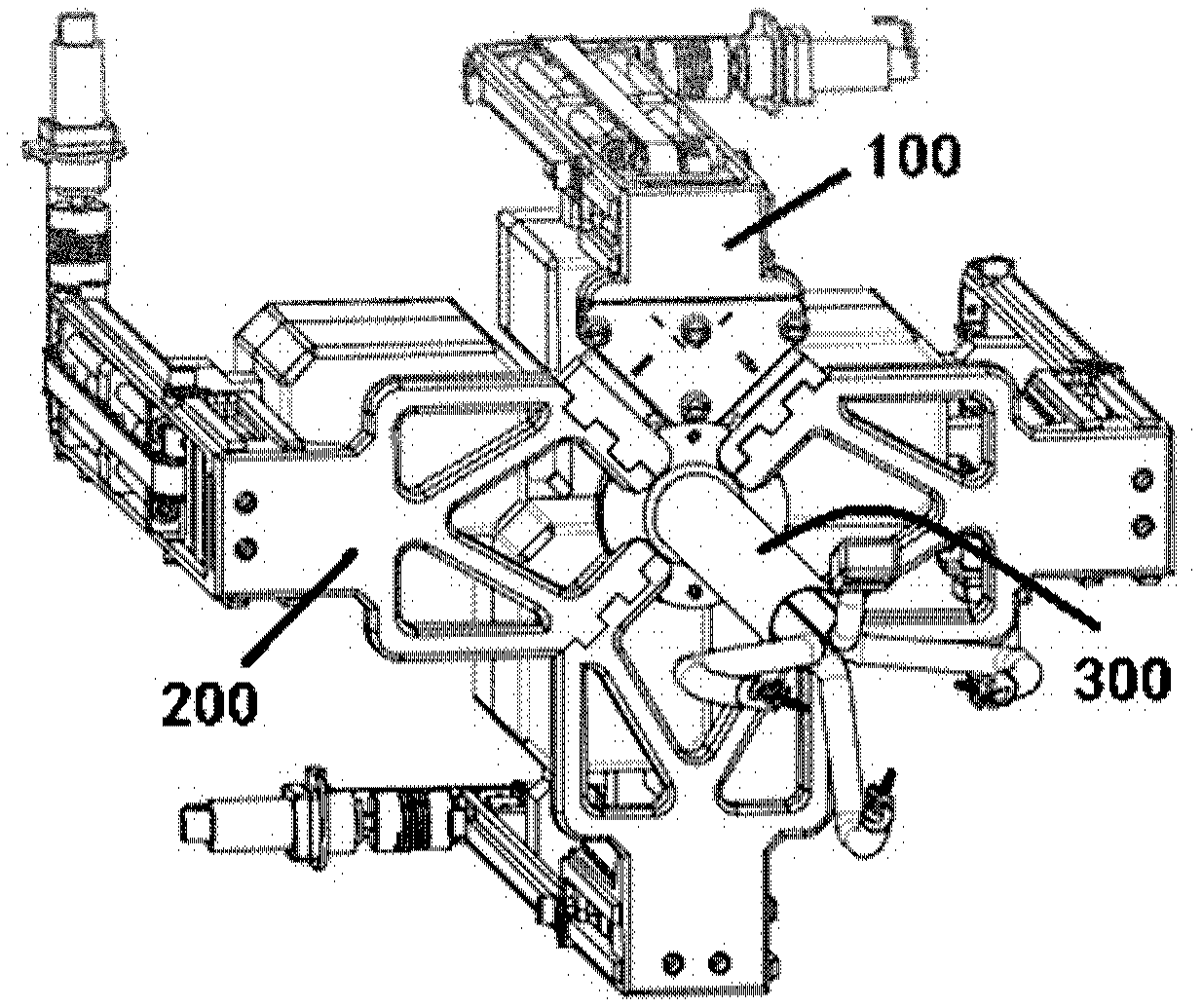
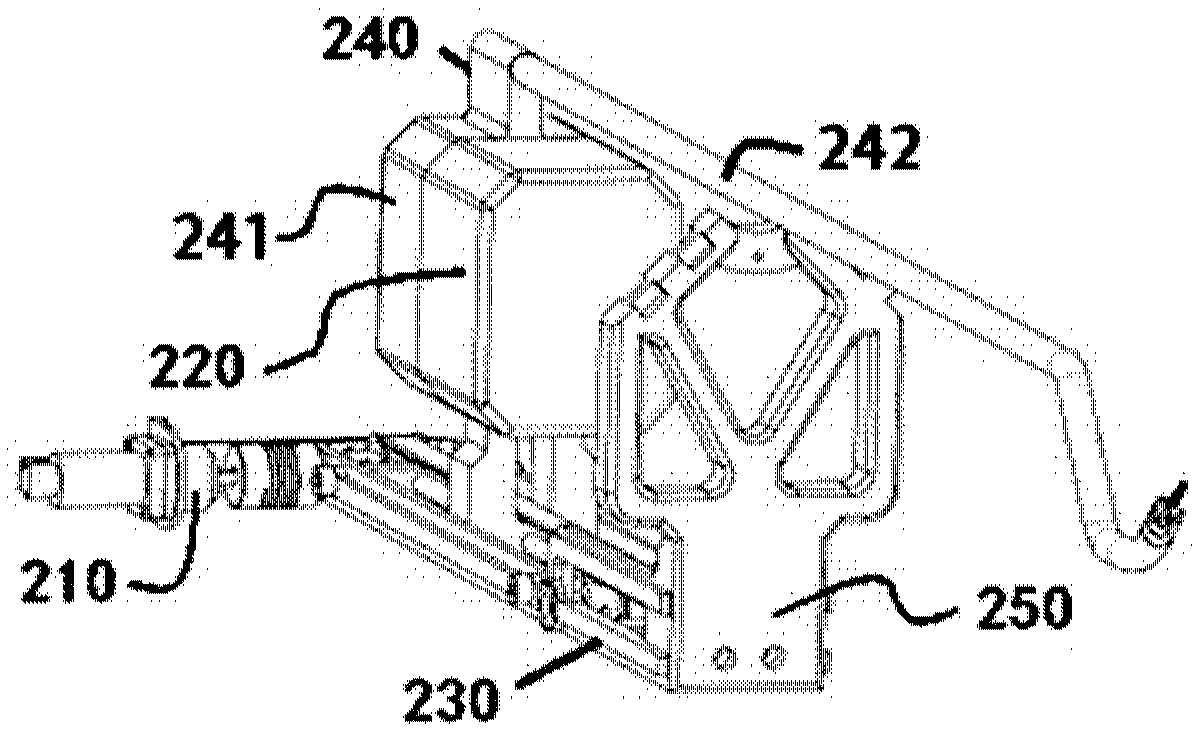
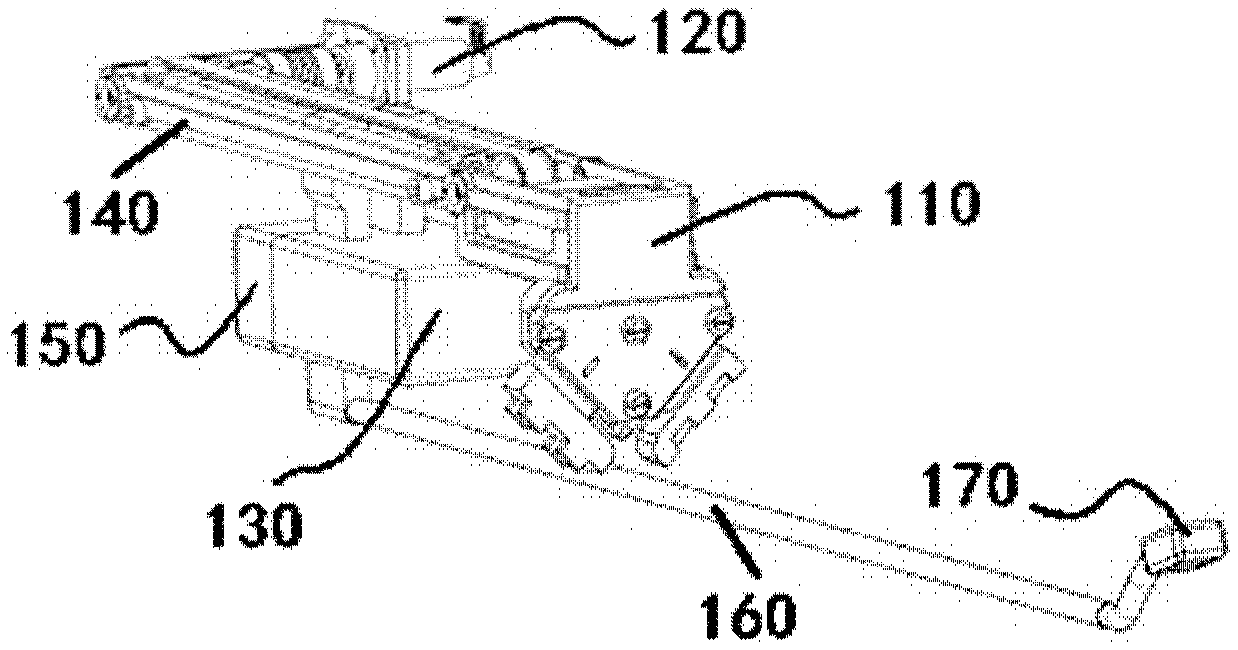
[0091] The present disclosure provides a mode-reconfigurable minimally invasive surgical robot slave hand system, which includes: an operating arm module and an endoscope module when applied to single-hole minimally invasive surgery; the operating arm module is used to perform surgical operations, including: operating arm Guide rail driving motor, operating arm driving motor, operating arm guide rail, operating arm and lock tooth connection end; operating arm includes operating arm driving mechanism and operating arm actuator connected to it; operating arm guide rail is driven by operating arm guide rail driving motor; operating arm The driving motor is connected with the guide rail of the operating arm; the driving mechanism of the operating arm is connected with the driving motor of the operating arm through the interface, and the clamp at the end of the operating arm performs the surgical operation; the driving motor of the operating arm provides power for the operating arm a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More