

Trajectory optimization method for spraying robot based on reinforcement learning
A spraying robot and trajectory optimization technology, applied in the direction of instruments, two-dimensional position/channel control, non-electric variable control, etc., can solve problems such as difficult to achieve dynamic real-time planning, affect the effect of manipulator control, and large amount of calculation. Achieve high success rate, high accuracy, and overcome poor real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
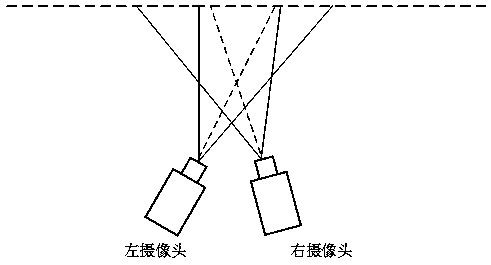
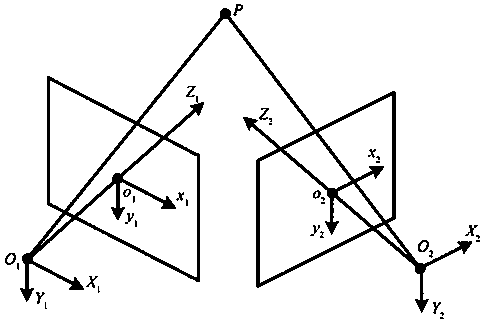
[0045] In this embodiment, the binocular vision system in the spraying robot trajectory optimization method based on reinforcement learning, such as figure 2 As shown, the left and right cameras can be placed in parallel, and the baseline must not be too long. The left and right cameras in the parallel optical axis binocular vision system are rotated clockwise and counterclockwise by a certain angle around the optical center to form convergent binocular vision. system; the advantage of this system is that it can obtain a larger field of view, and the advantage of a large field of view is that it can improve the accuracy of calculating parallax, thereby improving the accuracy of 3D reconstruction.
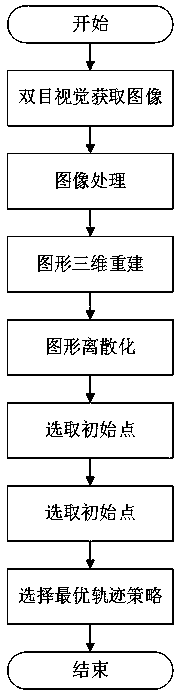
[0046] In this embodiment, the trajectory optimization method of the spraying robot based on reinforcement learning, such as figure 1 As shown, through image acquisition, image processing, three-dimensional reconstruction of graphics, graphics discretization, selection of initial p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More