

Multi-UAV route planning and dynamic obstacle avoiding method based on combination of Voronoi ant colony algorithm with artificial potential field method
A route planning and multi-UAV technology, applied in non-electric variable control, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problem of small amount of calculation, algorithm falling into local optimum, path oscillation, etc. problem, to achieve the effect of short iteration time, solving the problem of dynamic obstacle avoidance, and avoiding excessive excitement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solution of the present invention is described in detail in combination with the accompanying drawings.
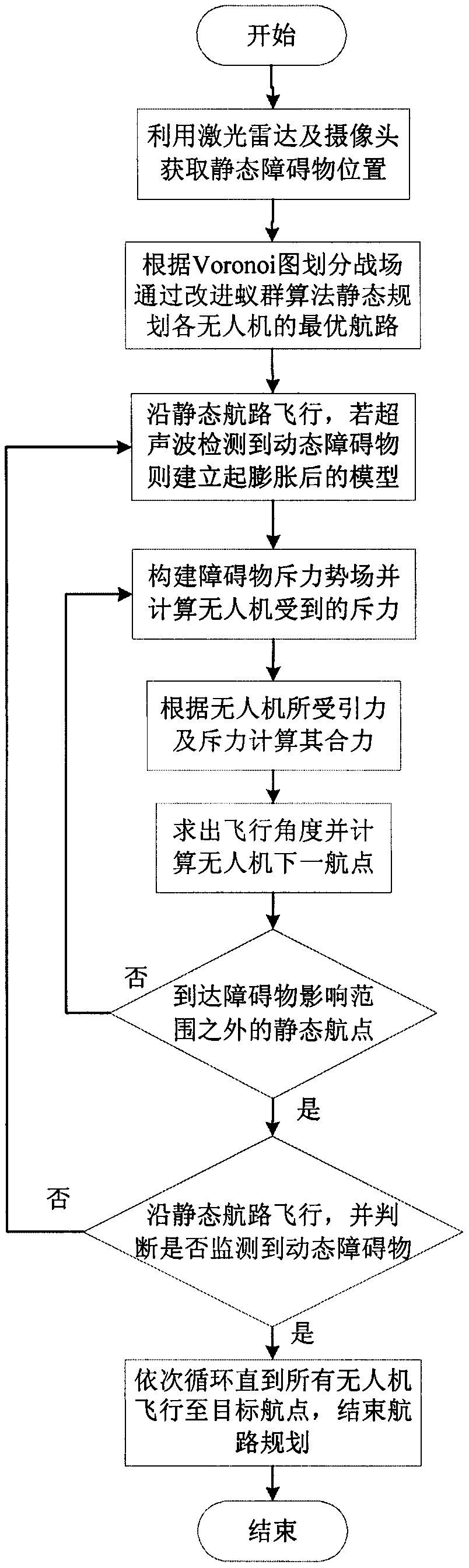
[0028] A kind of Voronoi ant colony algorithm of the present invention and artificial potential field method combine multi-unmanned aerial vehicle route planning and dynamic obstacle avoidance method, specifically comprise the following steps:
[0029] Step 1 Set the size of the environment area, the starting position of the UAV, the flight step of the UAV, and the maximum flight speed V of each UAV max , and the multi-rotor UAV can hover so there is no minimum speed limit, the coefficient k of threat cost and route fuel cost 1 =k 2 . Set the gain coefficient, including the total number of ants in the ant colony algorithm m, the maximum number of iterations N cmax , pheromone weight factor α, heuristic function weight factor β, pheromone volatilization coefficient ρ, pheromone intensity Q, target gravitational gain K A , the obstacle repulsion gain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More