

Robot simulating jumping and walking of springtails
A walking robot and springtail technology, applied in the field of robots, can solve the problems of limited adaptability to complex environments, inability to achieve continuous jumping, low energy utilization efficiency, etc., and achieve the effects of simplified transmission mechanism, simple driving mode, and simple driving.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
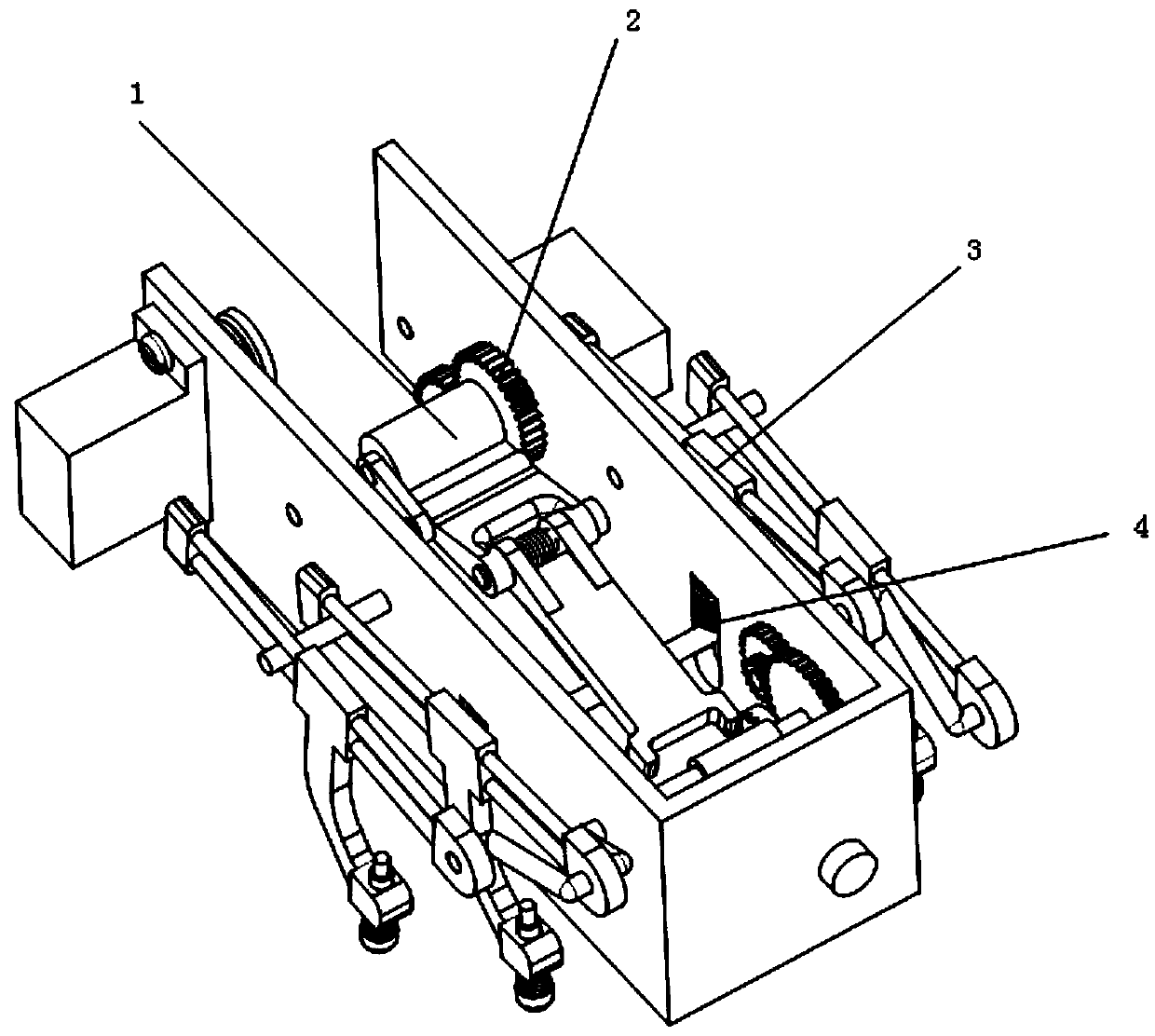
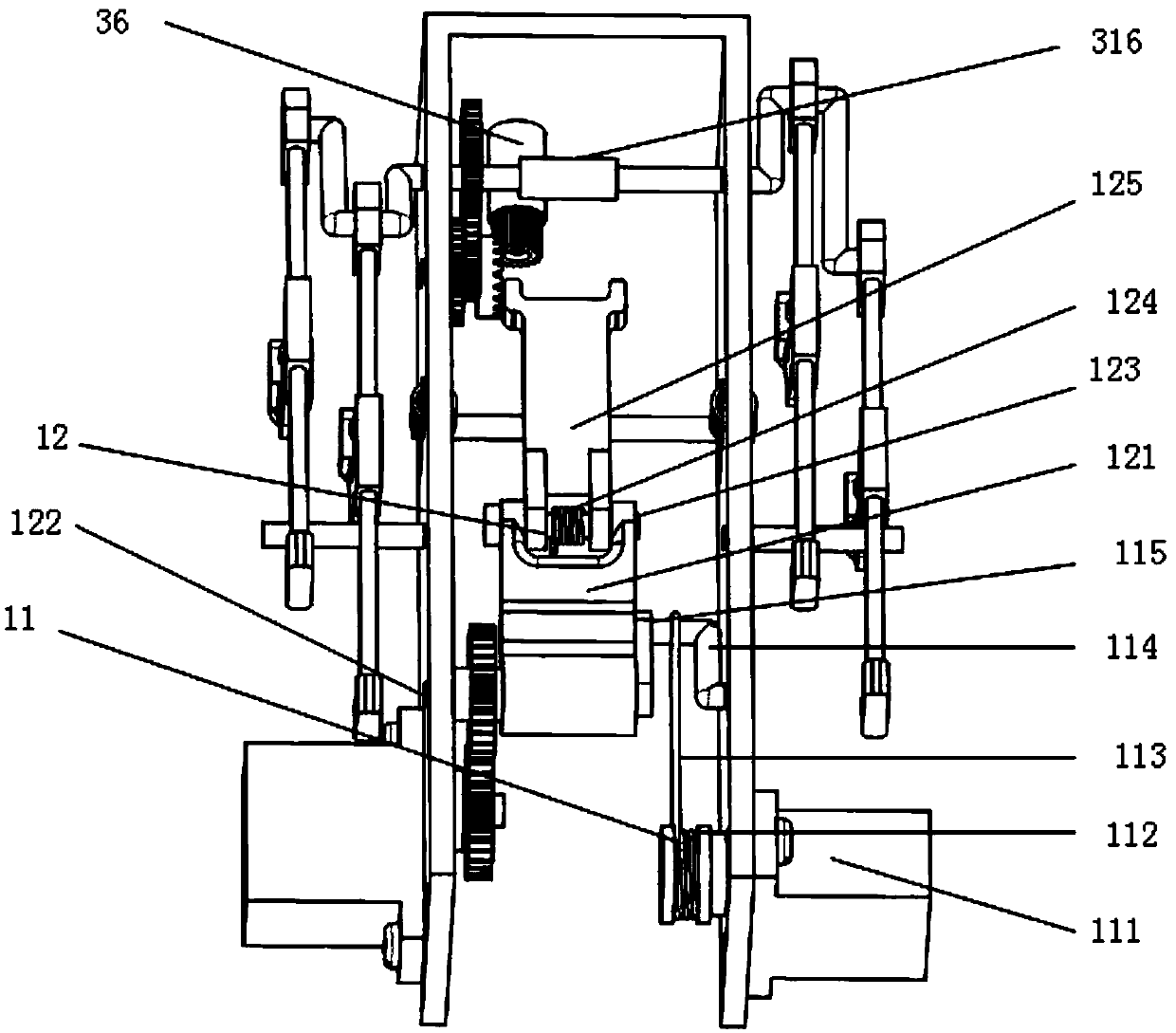
[0046] like figure 1 and 2 As shown, the springtail imitation jumping and walking robot of the present embodiment includes a jumping structure 1 , a jumping reset structure 2 , a walking structure 3 , and an auxiliary jumping structure 4 .
[0047] The jump mechanism 1 includes two parts: a jump drive structure 11 and a jump execution structure 12 .
[0048] In the jump driving structure 11, the reduction motor one 111 is installed on the fuselage 311, and the reel 112 is installed on the reduction motor one 111, and one end of the nylon rope 113 is fixedly connected on the reel 112, and the other end is connected on the jumping shaft one 114, and the jumping shaft One end of one 114 is connected with the fuselage 311, and one end passes through the connecting plate 115 and one end is connected with the base handle 121. One end is installed on the fuselage 311 .
[0049] In the jumping execution structure 12, the base handle 121 is fixedly connected with the jump rotating s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More