

Omni-directional active friction end effector for space target control
An end-effector, space target technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve problems such as failure of capture tasks and equipment damage, and achieve the effect of intelligent capture plan and high capture efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0033] The present invention provides an omnidirectional active friction end effector for space target manipulation. The end effector is used as the end effector of a space capture manipulator, which can effectively solve the spin motion passive derotation capture of non-cooperative targets. question.
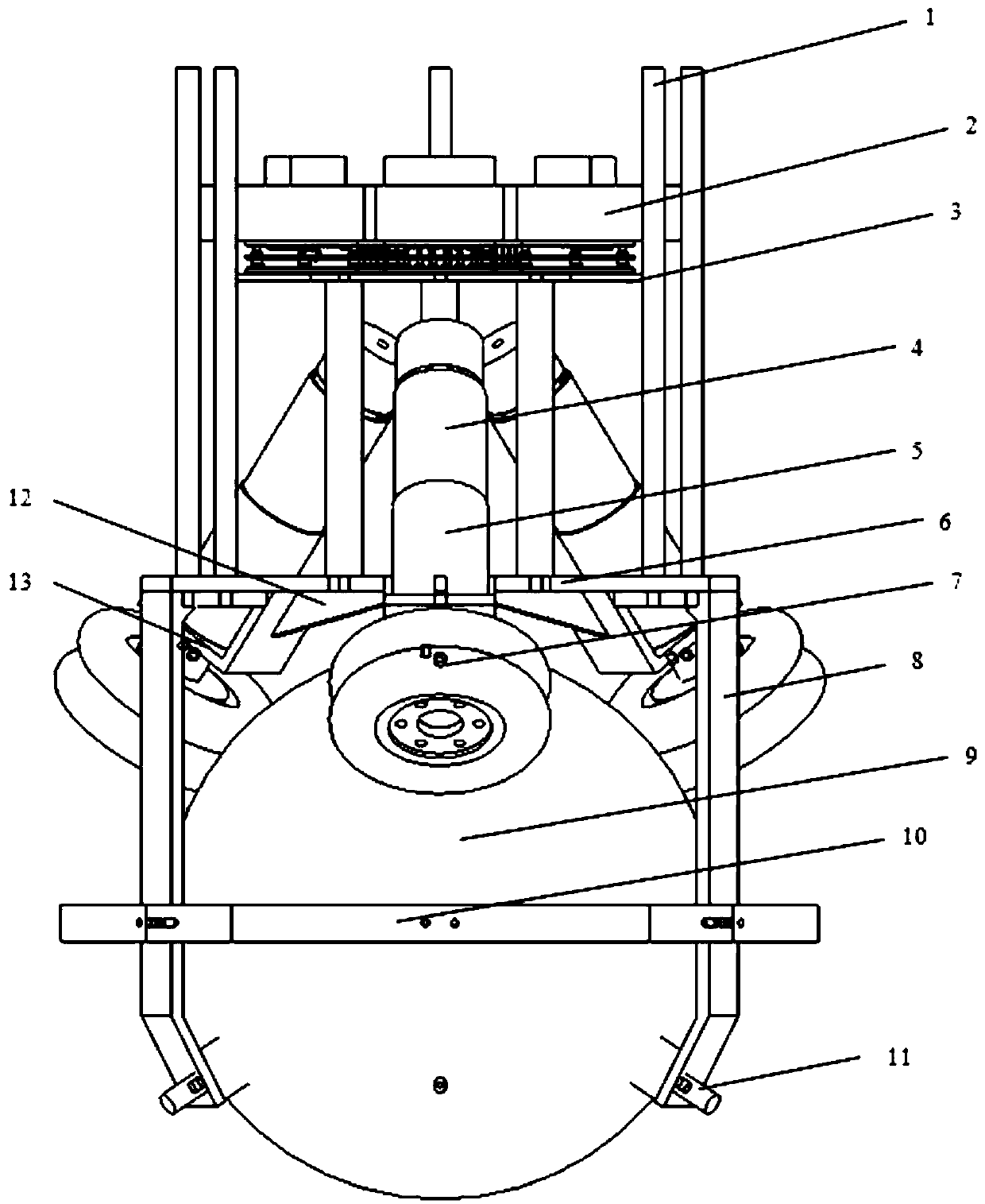
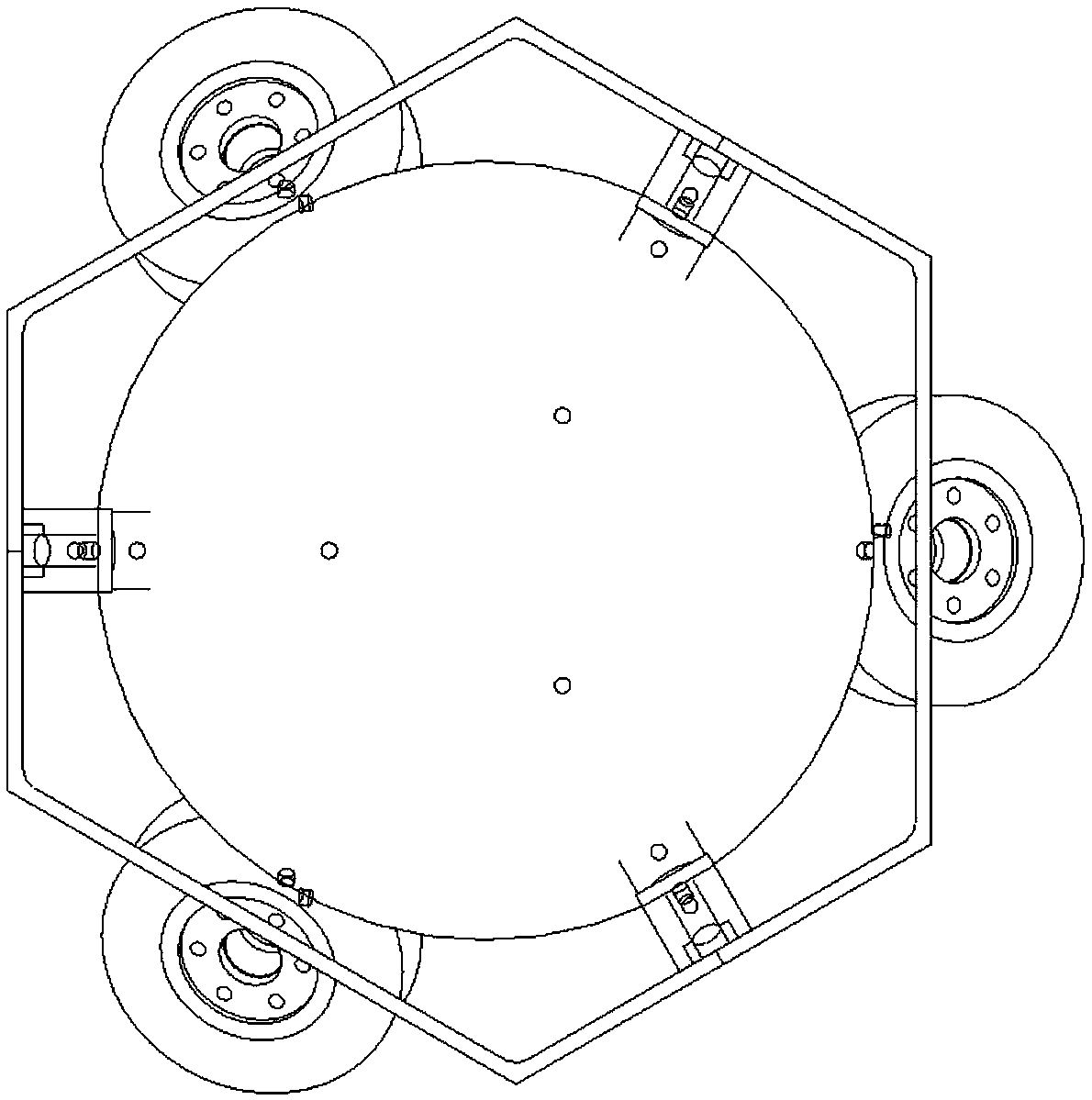
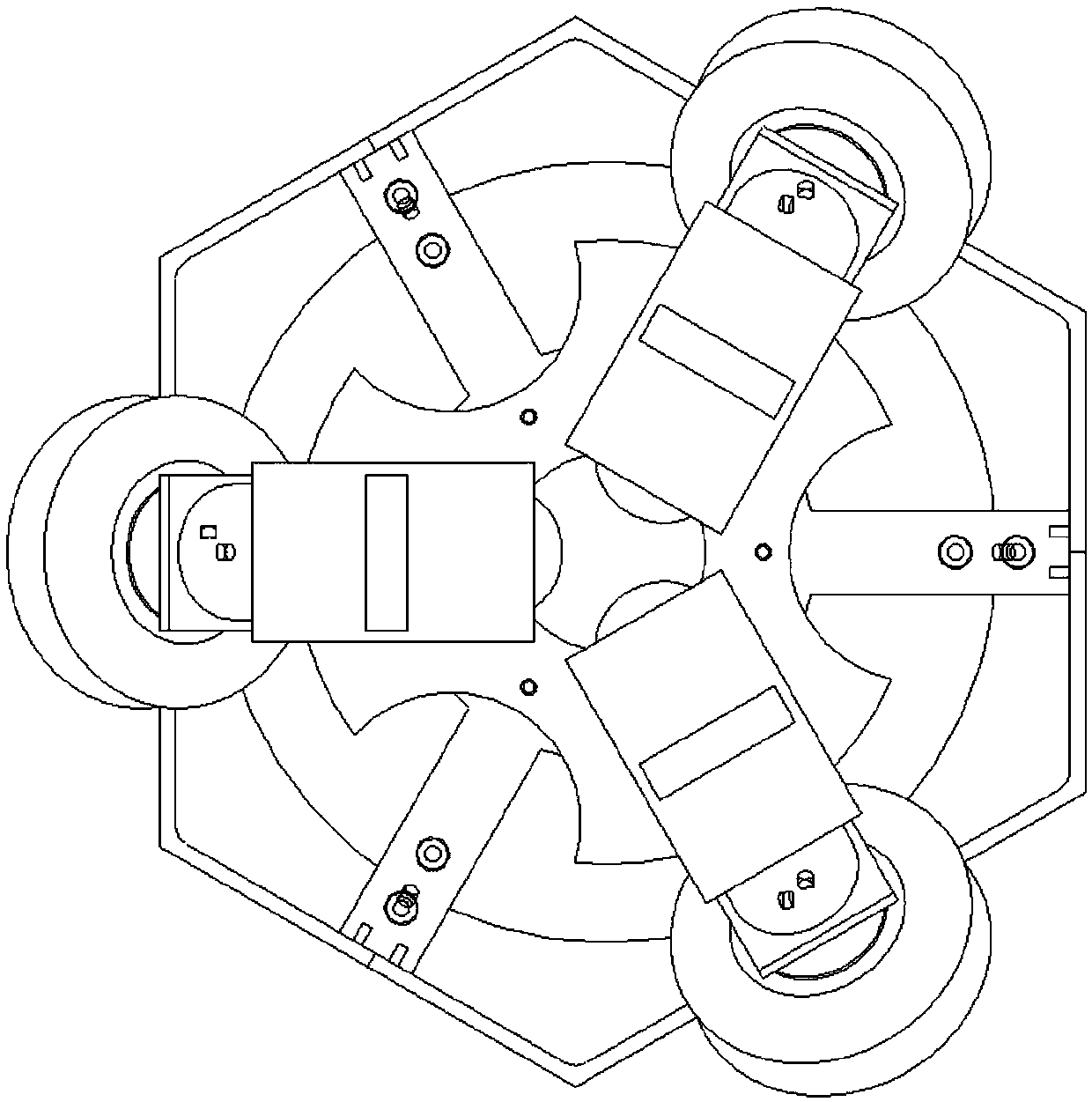
[0034] like figure 1 As shown, the omnidirectional active friction end effector includes a friction ball 9, a friction ball power device, a friction ball restraint device and a linear module clutch device; wherein:
[0035] The friction ball power device is used to provide the omnidirectional rolling power of the friction ball 9;
[0036] The friction ball restraint device provides omnidirectional restraint for the friction ball 9 in the free space, and limits the rotation of the friction ball 9 within a certain space range; it is fixedly c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More