

Automatic driving risk evaluation method considering uncertainty
An automatic driving and risk assessment technology, applied in the field of automatic driving risk assessment considering uncertainty, can solve problems such as high uncertainty and difficulty in measuring vehicle parameters involved in traffic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
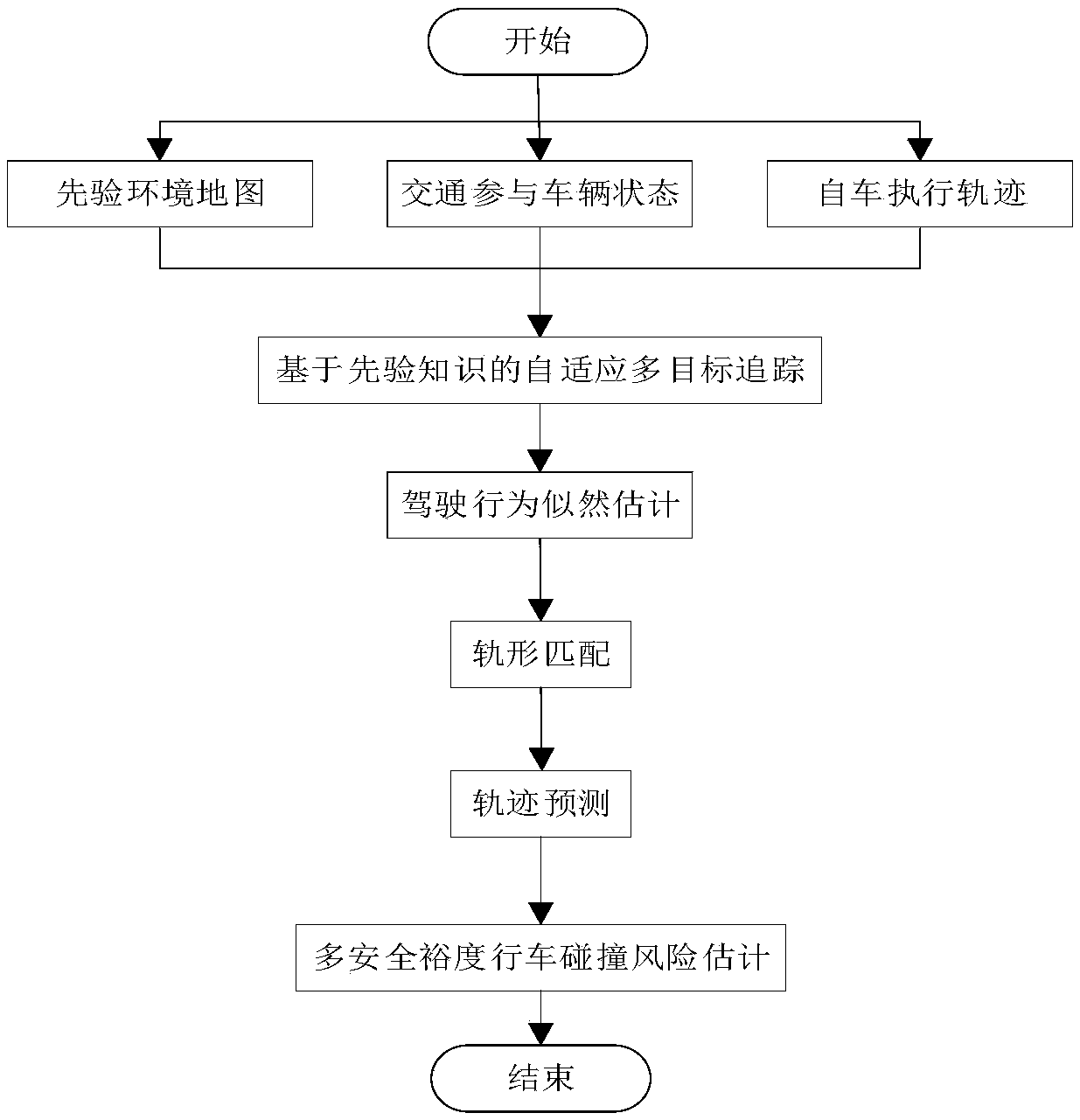
[0092] The present invention relates to a risk assessment method for automatic driving considering uncertainty, such as figure 1 As shown, the method includes the following steps:
[0093] Step 1. Construct a priori environment map;
[0094] The prior environment map contains a multi-grained map of directed nodes in the driving direction, and fixed information such as road surface characteristics (mainly road curvature, slope, etc.) and road structural elements (speed bumps, road piles, road edges, etc.) are used as knowledge.
[0095] Step 2. Observing the state of vehicles involved in traffic and obtaining state data;
[0096] Vehicle state observation is divided into space observation and time observation. Among them, space observation mainly obtains the position and orientation angle of the vehicle in the horizontal plane; time observation mainly obtains the vehicle's velocity, acceleration and yaw rate.
[0097] Step 3: Call the execution track of the own vehicle;
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More