

Method for obtaining and verifying kinematic parameters of industrial robot based on space vector method
A robot kinematics and space vector technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as poor practicability, achieve good practicability, low hardware cost, and reduce space-time complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
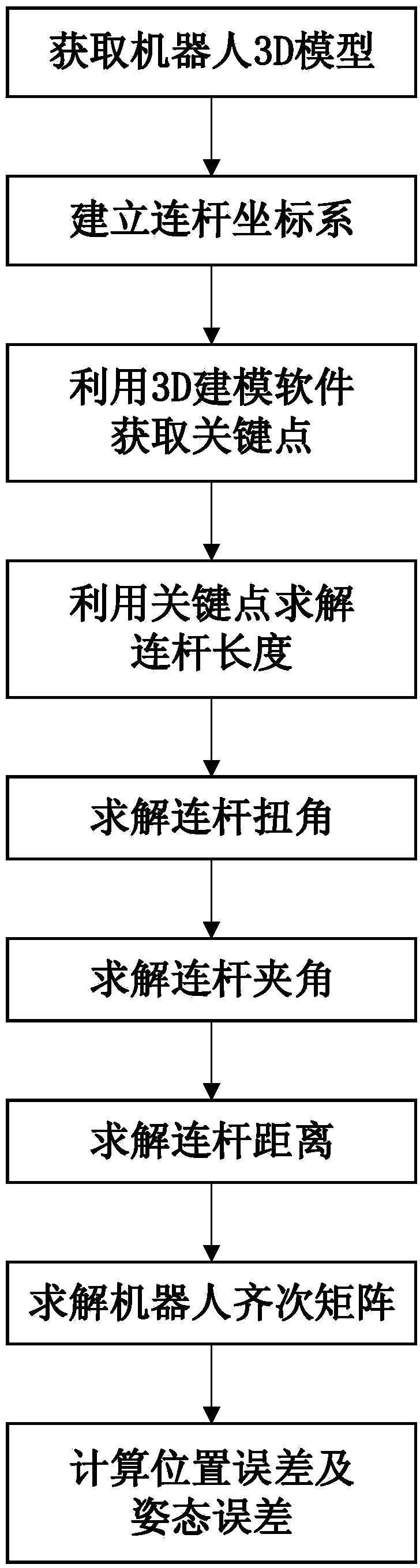
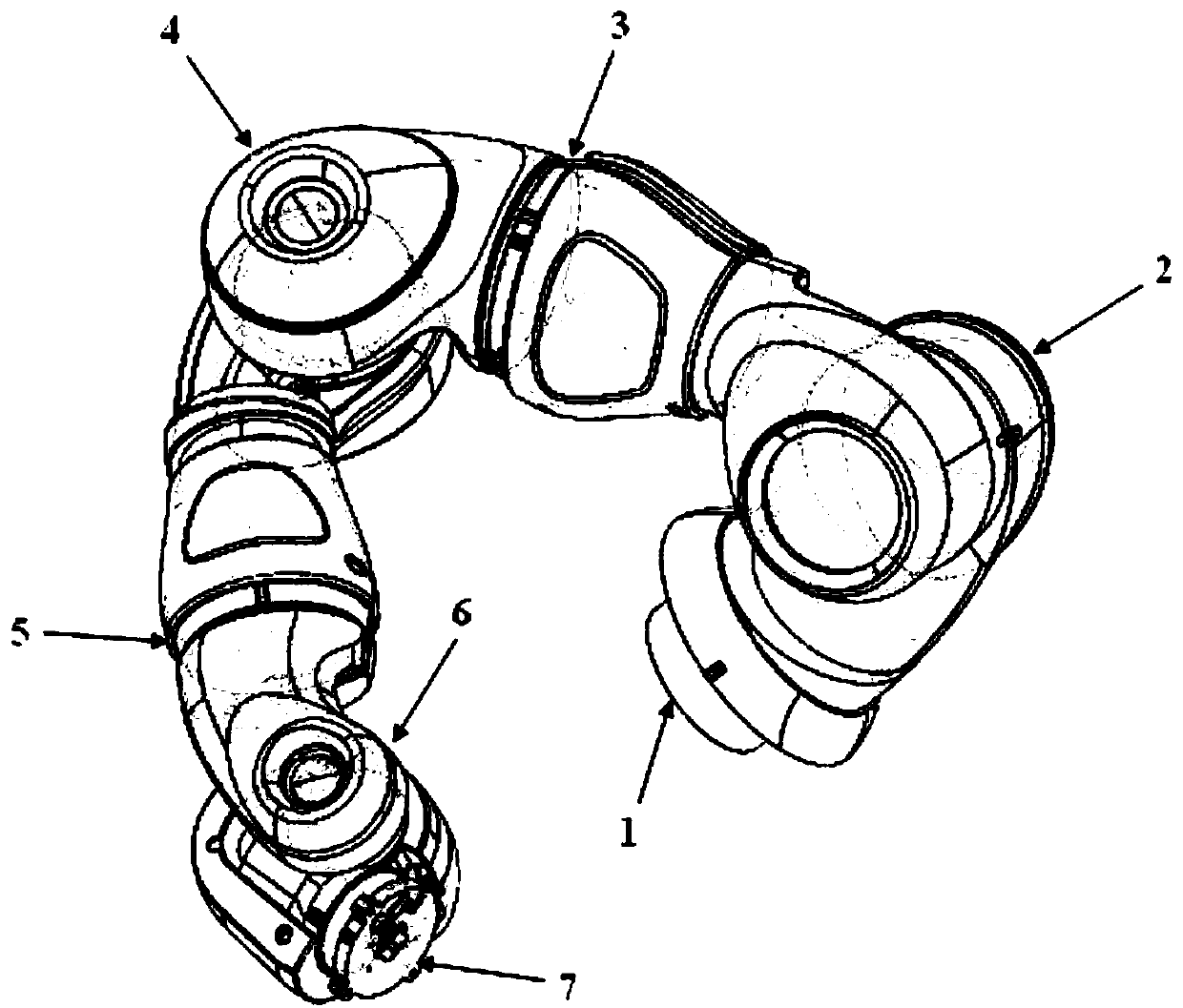
[0035] Reference Figure 1-5 . The object of implementation of the present invention is the IRB14000 robot produced by ABB Robotics. The specific steps of the method for obtaining and verifying the kinematic parameters of the industrial robot based on the space vector method are as follows:
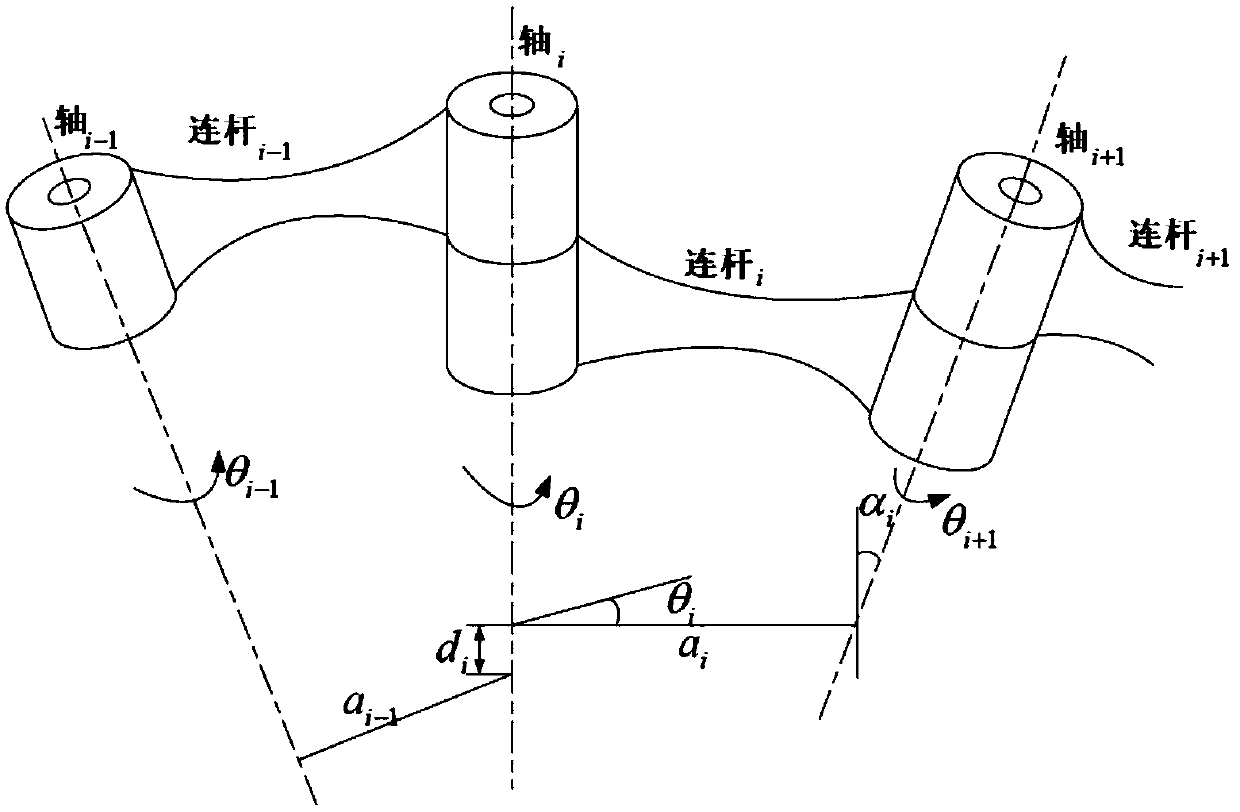
[0036] 1. The coordinate system is established.
[0037] The link coordinate system is determined according to the following steps: each joint axis of the robot, and draw their extension lines, on the joint i, establish the coordinate axis z along the axis i , The positive direction is arbitrary; make the common perpendicular of the joint axis i and the joint axis i+1, the intersection of the common perpendicular and the axis is the origin of the coordinate system, and the coordinate axis x i From the origin of the coordinate system i to i+1 along the common vertical line; the coordinate axis y i Determined according to the right-hand rule. image 3 It is a schematic diagram of a single joint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More