

Vehicle control method and device based on automatic driving, equipment and medium
A technology for automatic driving and vehicle control, applied in vehicle position/route/altitude control, non-electric variable control, position/direction control, etc. The effect of maintaining safety and reducing burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
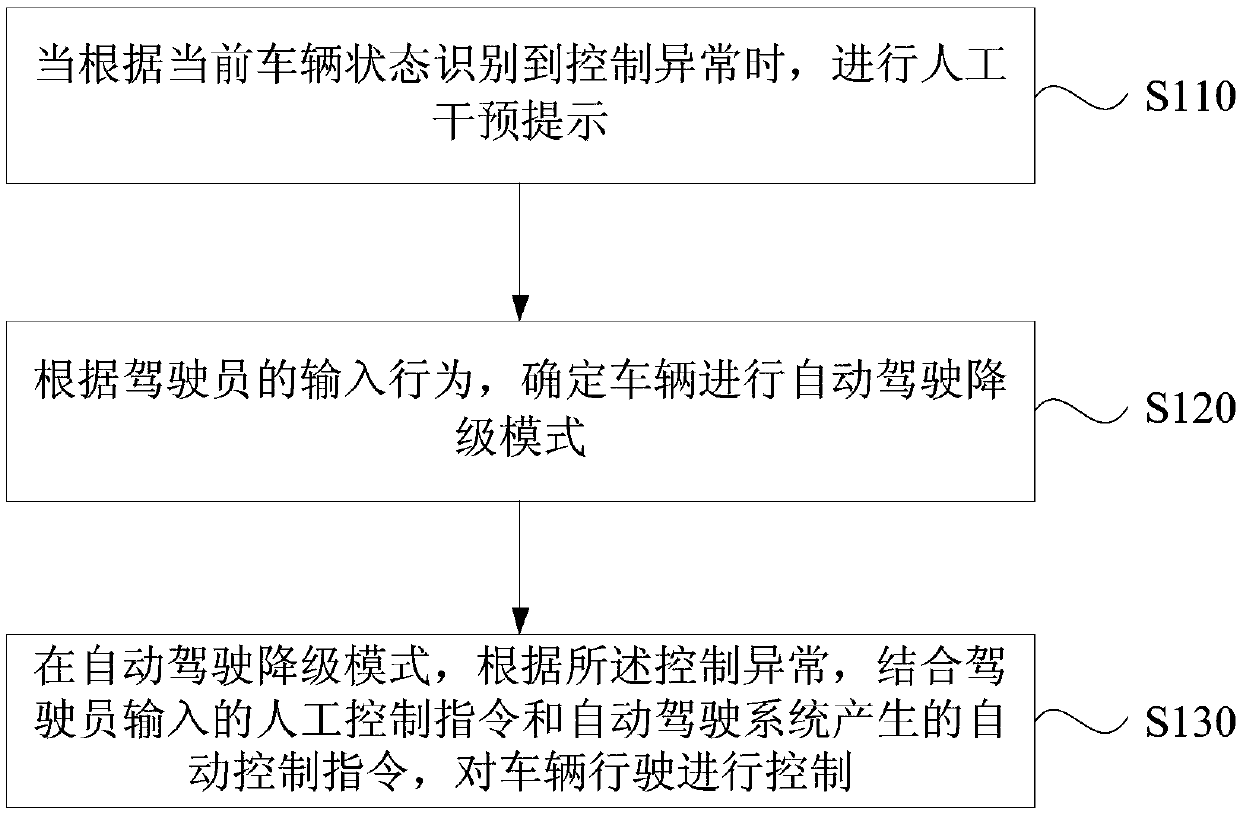
[0028] figure 1 The flow chart of a vehicle control method based on automatic driving provided by Embodiment 1 of the present invention is applicable to the situation where the automatic driving level falls back when the control is abnormal during the automatic driving process of the vehicle. The method of this embodiment can be based on automatic driving It can be implemented by a vehicle control device, which can be realized by hardware and / or software, and can generally be integrated into a vehicle navigation control device or a computer device. Such as figure 1 As shown, the method of this embodiment specifically includes:
[0029] S110 , when a control abnormality is identified according to the current vehicle state, a manual intervention prompt is performed.
[0030] Self-driving vehicles plan a space-feasible and time-controllable unmanned road network based on the current vehicle behavior (turning, climbing, meeting, accelerating or decelerating, etc.) and satisfying...
Embodiment 2
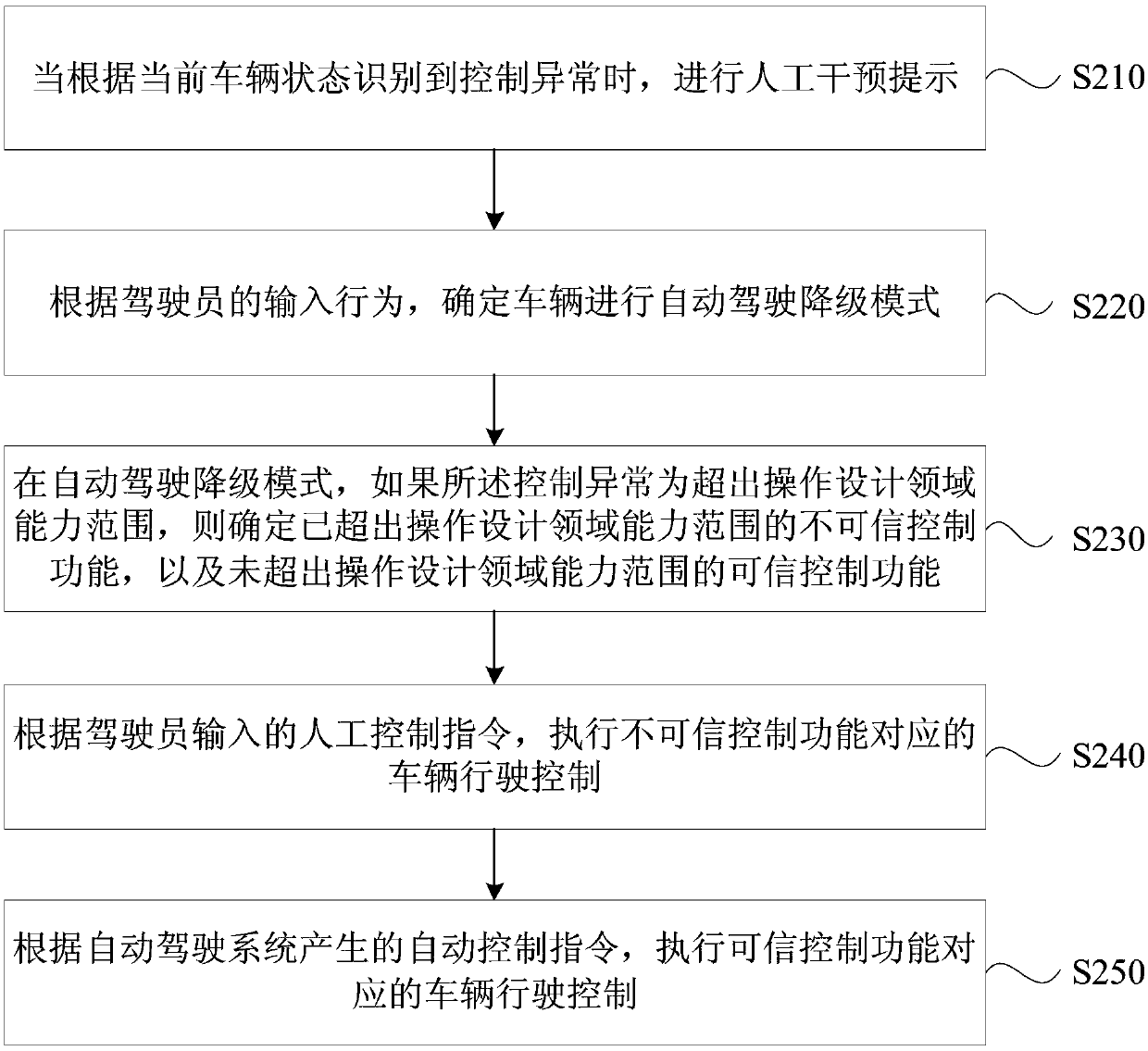
[0047] figure 2 A flow chart of a vehicle control method based on automatic driving provided by Embodiment 2 of the present invention is shown, and this embodiment further optimizes each optional implementation manner in the foregoing or following embodiments. Such as figure 2 As shown, the vehicle control method based on automatic driving specifically includes:
[0048] S210 , when a control abnormality is identified according to the current vehicle state, a manual intervention prompt is given.
[0049] S220. Determine that the vehicle is in an automatic driving degraded mode according to the driver's input behavior.
[0050] S230. In the automatic driving degraded mode, if the control abnormality exceeds the capability range of the operation design field, determine the untrusted control functions that have exceeded the capability range of the operation design field, and the trusted control functions that do not exceed the capability range of the operation design field. ...
Embodiment 3
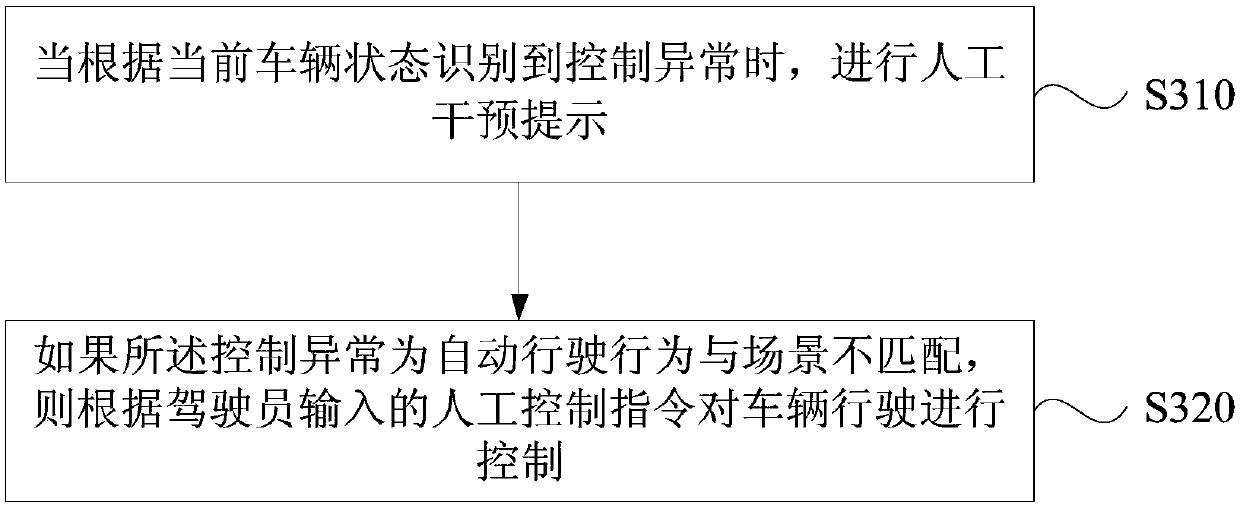
[0063] image 3 A flow chart of a vehicle control method based on automatic driving provided by Embodiment 3 of the present invention is shown, and this embodiment further optimizes each optional implementation manner in the foregoing or following embodiments. Such as image 3 As shown, the vehicle control method based on automatic driving specifically includes:
[0064] S310. When a control abnormality is identified according to the current vehicle state, a manual intervention prompt is performed.
[0065] S320. If the control abnormality is that the automatic driving behavior does not match the scene, control the driving of the vehicle according to the manual control instruction input by the driver.
[0066] For example, the situation where the automatic driving behavior does not match the scene includes at least one of the following: a need to pull over or an emergency stop in a highway scene; a need to pull over or an emergency stop when vehicle communication is interrup...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More