

System and method for inspecting fault submarine cable through remote-control underwater robot with cable
A technology for underwater robots and submarine cables, which is applied in the installation of cables, underwater ships, underwater operating equipment, etc. It can solve problems such as limited operating range, robot damage, and poor navigation flexibility, so as to improve reliability and safety performance, improve inspection quality, and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
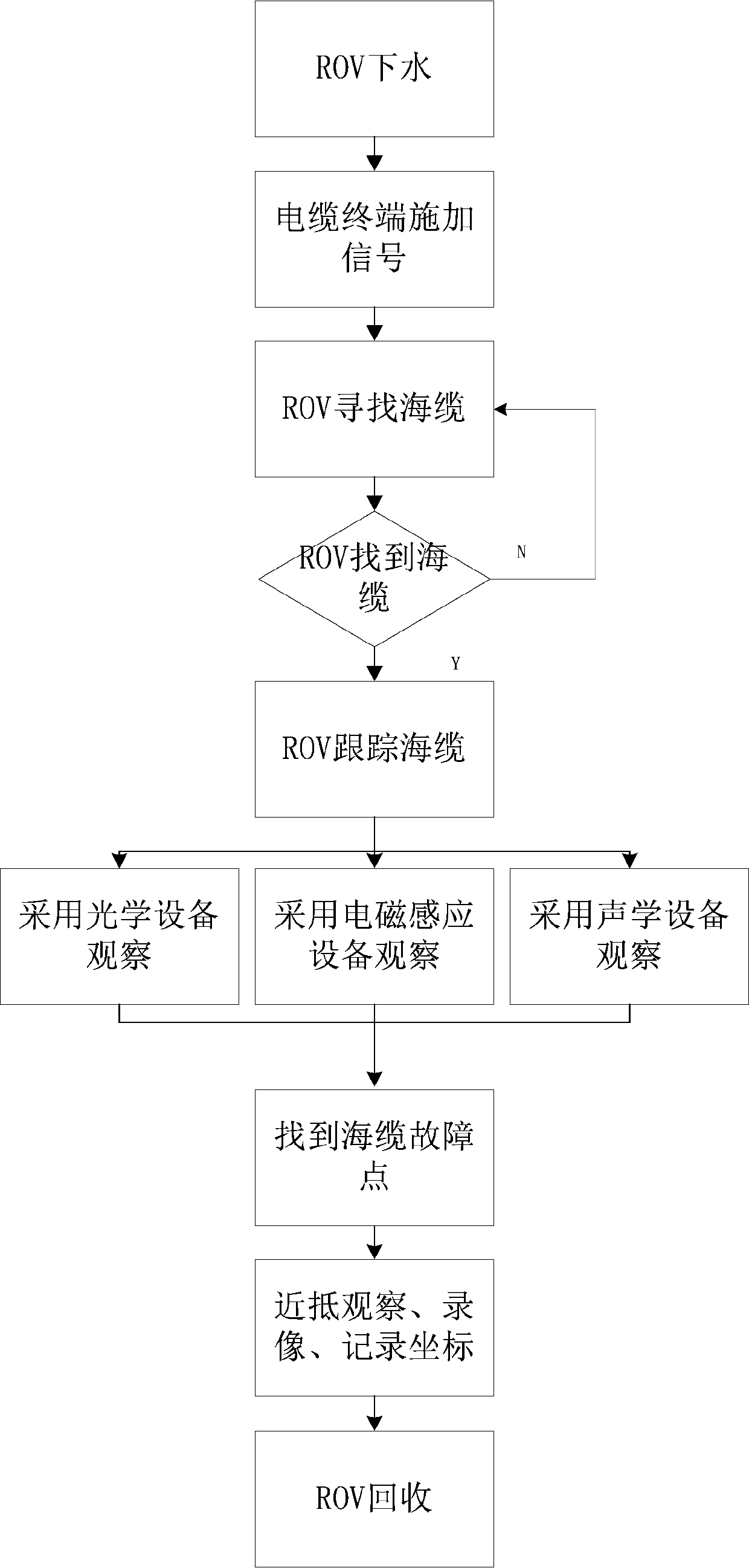
[0032] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
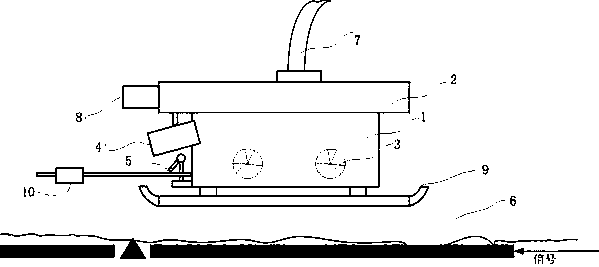
[0033] Such as figure 1As shown, the inspection system of a cable remote-controlled underwater robot to a faulty submarine cable is characterized in that it includes an underwater robot and a working boat connected to the underwater robot, and the working boat is connected to the underwater robot through an umbilical cable 7 to control the underwater robot. Get off the robot and provide electric energy to the underwater robot; the underwater robot includes an ROV body 1, a floating body 2 on the top of the ROV body 1, a propeller 3 on the ROV body 1, lighting and photography on the ROV body 1 Device 4, the electromagnetic induction detection instrument 10 and the mechanical arm 5 located at the front of the ROV body 1, the underwater positioning device for the positioning of the underwater robot, and the foot 9 located at the bottom ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More