

One-man foot-controlled mechanical arm for holding laparoscope
A technology of laparoscopy and robotic arm, which is applied in the field of single-person foot-controlled laparoscopic mirror-holding robotic arm, can solve the problems of wasting manpower and medical resources, reduce the number of medical staff, avoid the use of blind spots, and save manpower and material resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The present invention will be described in further detail below in conjunction with the embodiments given in the accompanying drawings.
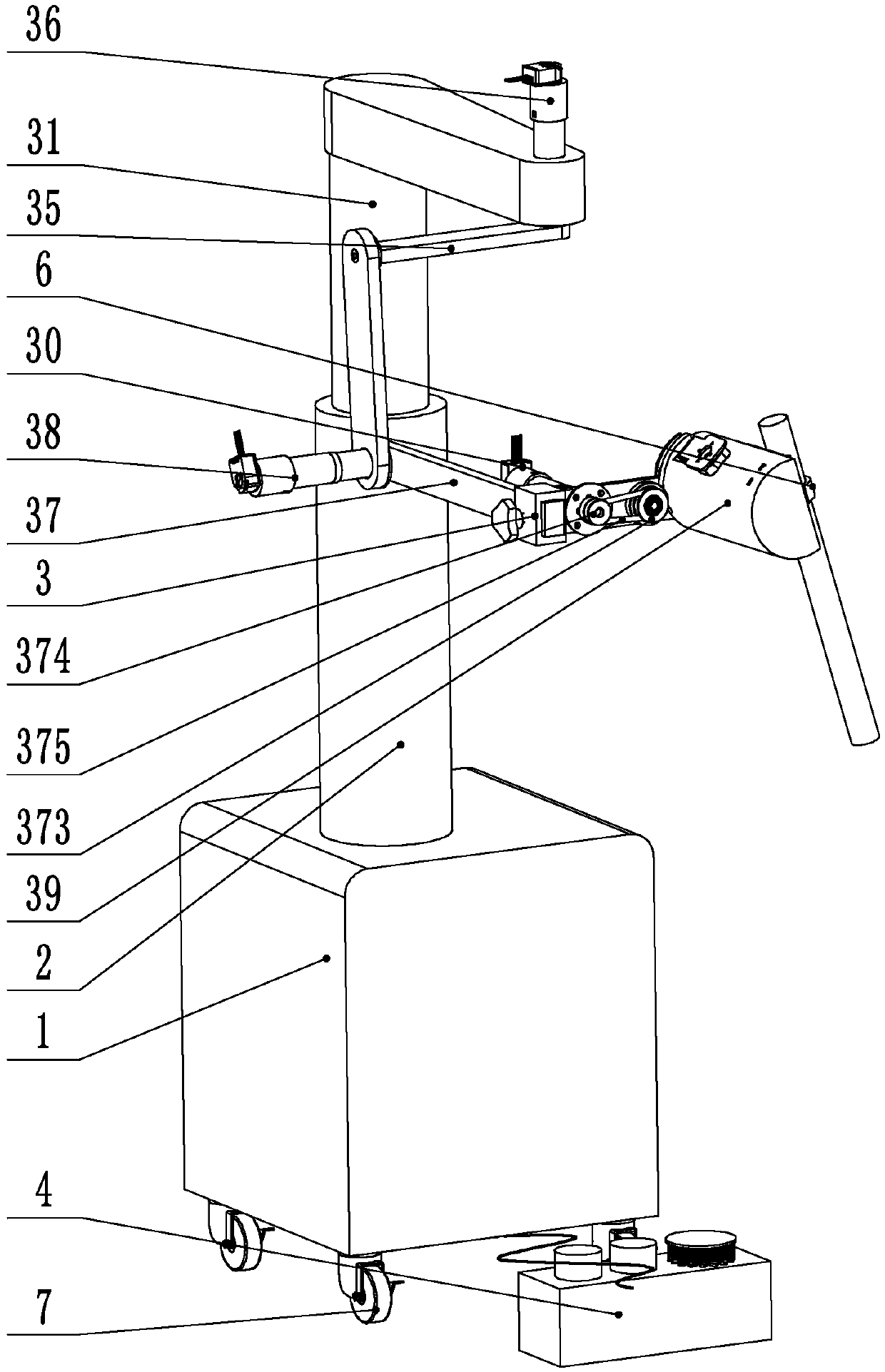
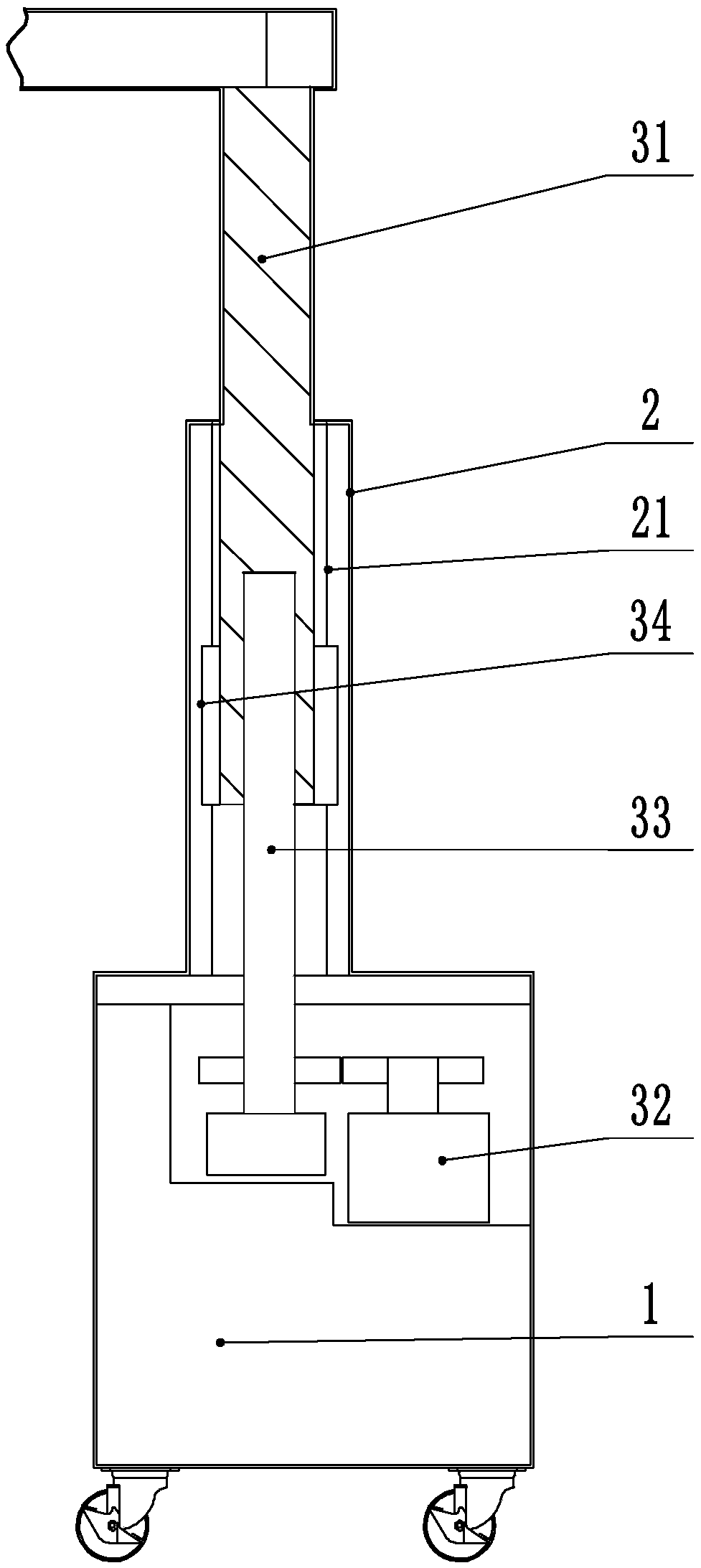
[0019] refer to Figure 1 to Figure 6 As shown, a single-person foot-controlled laparoscopic mirror-holding mechanical arm in this embodiment includes a base 1, a support column 2, a control arm assembly 3 and a control pedal 4, the support column 2 is fixed on the top of the base 1, and the control arm assembly 3 includes lifting arm 31, lifting motor 32, lifting screw rod 33, X rotating arm 35, X reduction motor 36, Y rotation arm 37, Y reduction motor 38, Z rotation arm 39, Z reduction motor 30 and a laparoscope The mounting seat 5 is provided with a fixed assembly 6 for fixing the laparoscope, the base 1 is provided with a control microcomputer for controlling the control arm assembly 3, the control microcomputer is connected with the control pedal 4, and the support column 2 is provided with a lift hole 21, lifting arm 31 is set...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More