

Robot for picking and delivering goods in unmanned supermarket and automatic loading method
A technology for robots and supermarkets, applied in conveyor objects, transportation and packaging, storage devices, etc., can solve problems such as the inability to meet the needs of robotics technology, achieve wide applicability, reduce management costs, and reduce labor intensity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
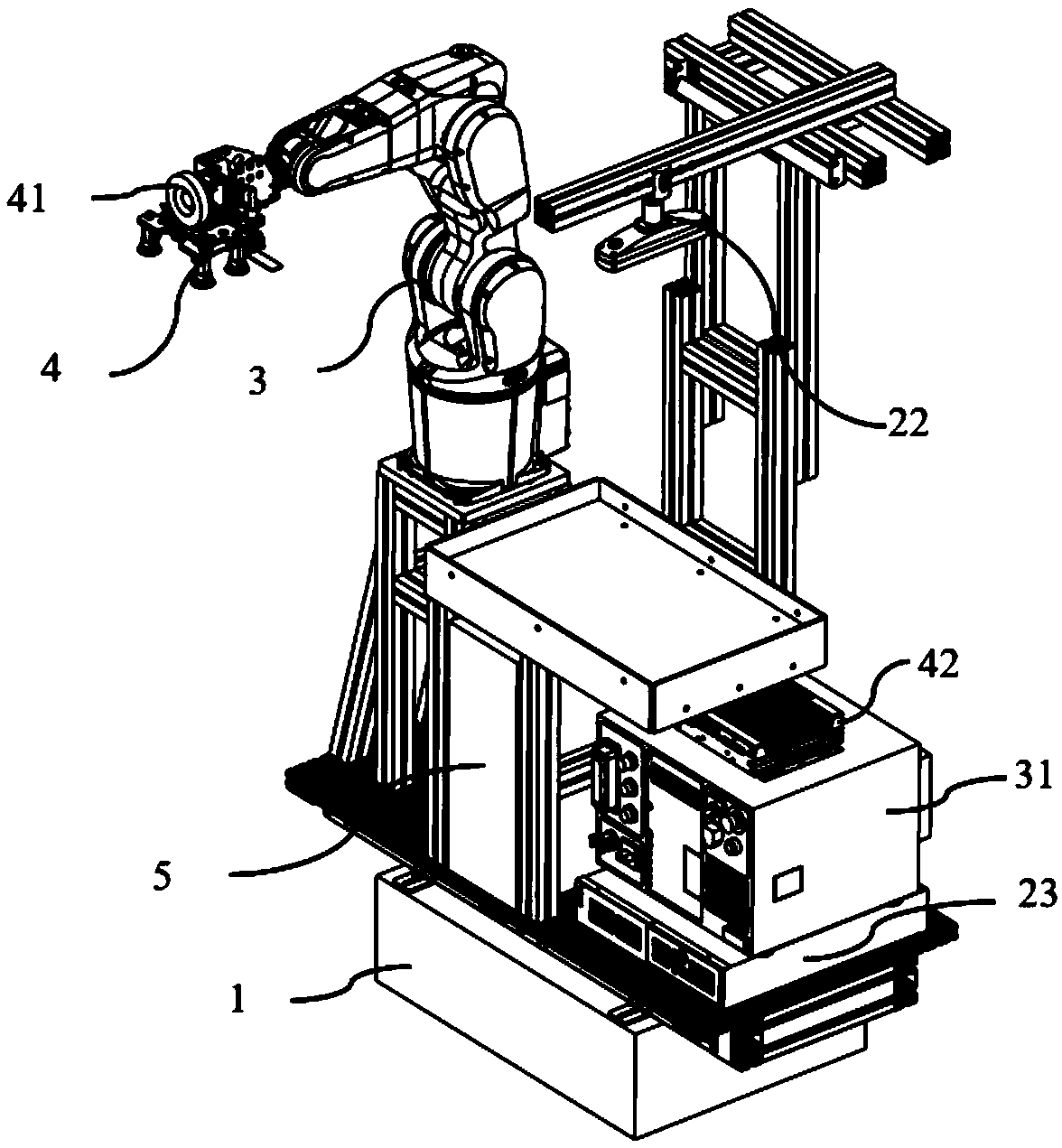
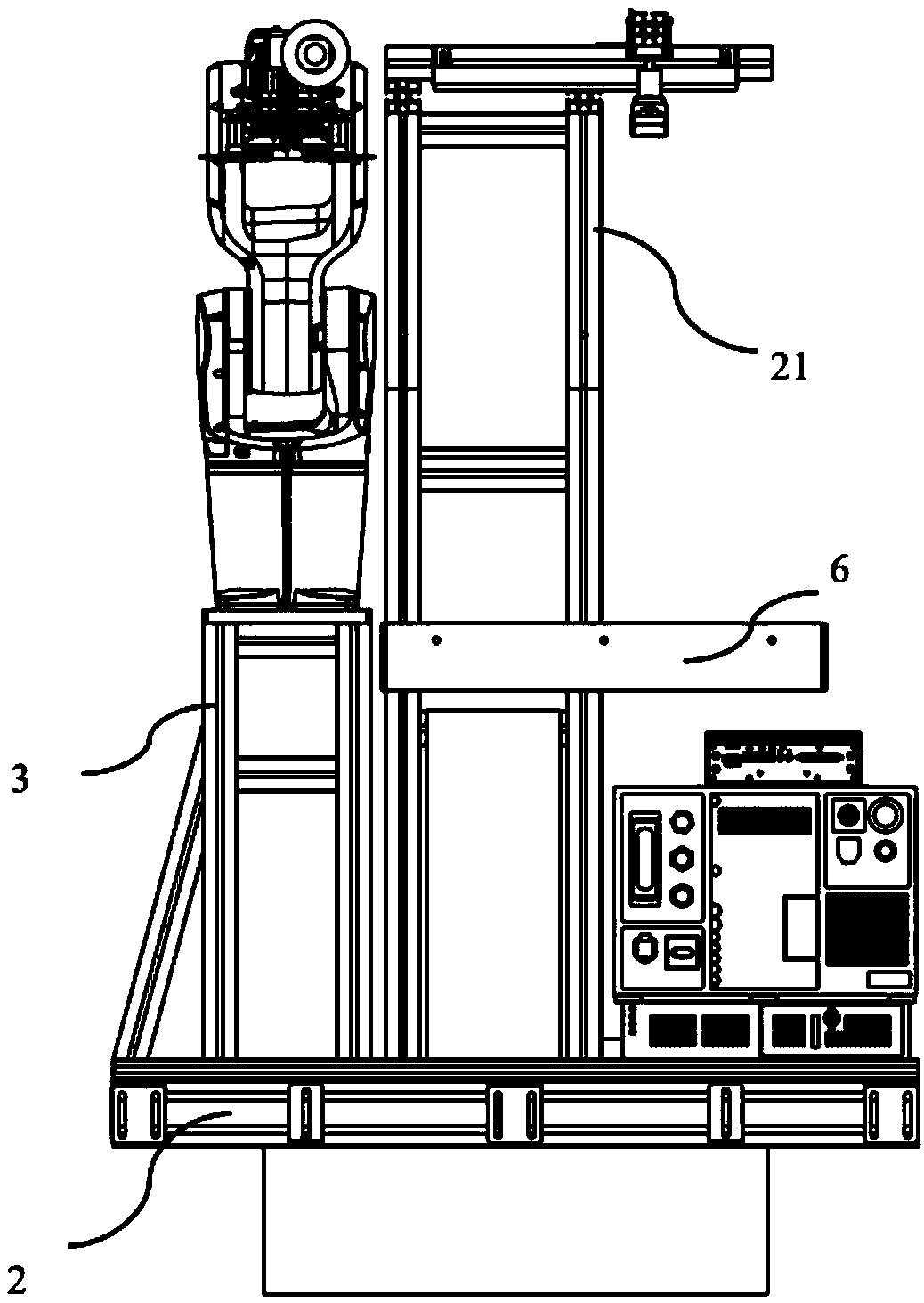
[0033] Embodiment 1: In a specific embodiment, a kind of unmanned supermarket picks and places the goods robot, such as figure 1 and figure 2 , including a power supply, an autonomous navigation car 1, a base 2 arranged on the autonomous navigation car 1, and a robot 3 arranged on the base 2; the base 2 is provided with a robot controller 31 for controlling the robot 3; the base 2 A support 21 is provided on the support 21, and a visual camera 22 is provided at one end of the support 21 away from the base 2; a grabbing device 4 is provided at an end of the robot 3 away from the base 2; The air compressor 5 that controls the opening and closing of the grasping device 4, the visual camera controller 23 that controls the visual camera 22, and the smart camera controller 42 that controls the smart camera 41; the base 2 is provided with a placement frame 6 for placing commodities.
[0034] In the above-mentioned embodiment, in the process of automatic loading of commodities, the ...
Embodiment 2
[0043] Embodiment 2: An automatic loading method for an unmanned supermarket pick-and-place robot, which is applied to a kind of unmanned supermarket pick-and-place robot described in any one of the above, including the following steps:
[0044] S1: Place the product in the placement frame 6 manually or automatically;
[0045] S2: The visual camera 22 collects the three-dimensional data of the commodities randomly placed in the commodity storage frame, and transmits the data to the visual camera controller 23 via Ethernet to obtain the grasping position data required by the robot 3 ;
[0046] S3: The robot 3 drives the smart camera 41 to take pictures of the captured goods, and exchange data with the database of the unmanned supermarket to confirm the type of the goods and the accurate position data that needs to be placed on the shelf;
[0047] S4: The robot 3 drives the grabbing device 4 to grab the commodity according to the grabbing position data;
[0048] S5: The accura...
Embodiment 3
[0053] Embodiment 3: An automatic pick-up method for an unmanned supermarket pick-and-place robot, which is applied to a pick-and-place robot for an unmanned supermarket described in any one of the above, including the following steps:
[0054] S1: The order system of the unmanned supermarket automatically delivers the product information to be captured;
[0055] S2: The autonomous navigation car 1 receives product information data and automatically moves to the side of the corresponding shelf;
[0056] S3: The robot 3 drives the smart camera 41 to take pictures of the commodities on the shelf, judge whether it is consistent with the template in the unmanned supermarket database, and calculate the commodity location information;
[0057] S4: The smart camera 41 collects the image of the two-dimensional code or barcode of the product attached to the shelf, and compares and confirms it with the order system of the unmanned supermarket;
[0058] S5: The robot 3 drives the grabbi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More