

Mechanical arm vision grabbing system and method based on self-supervised-learning neural network
A neural network and supervised learning technology, applied in the field of robotic arms, can solve the problems of not taking into account the important factors affecting the actual mass distribution of the grasped object, misestimation, etc., and achieve the effect of improving the success rate and accurately grasping the pose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
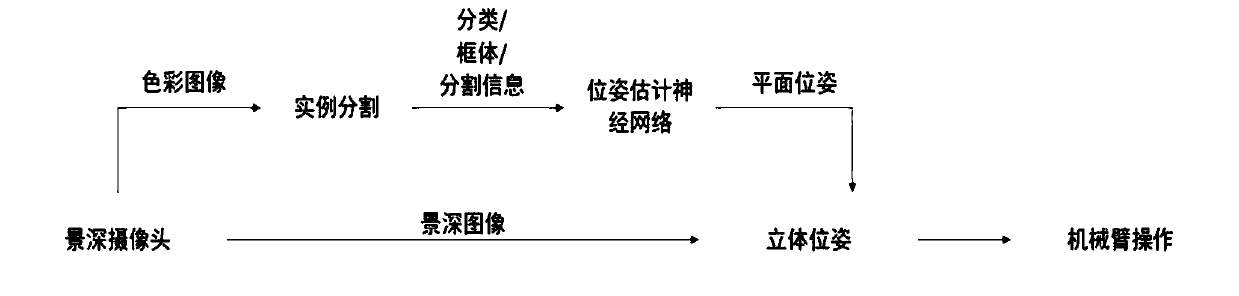
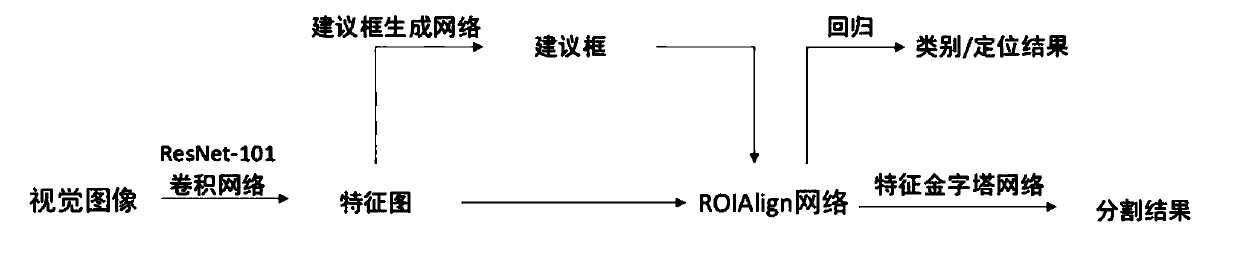
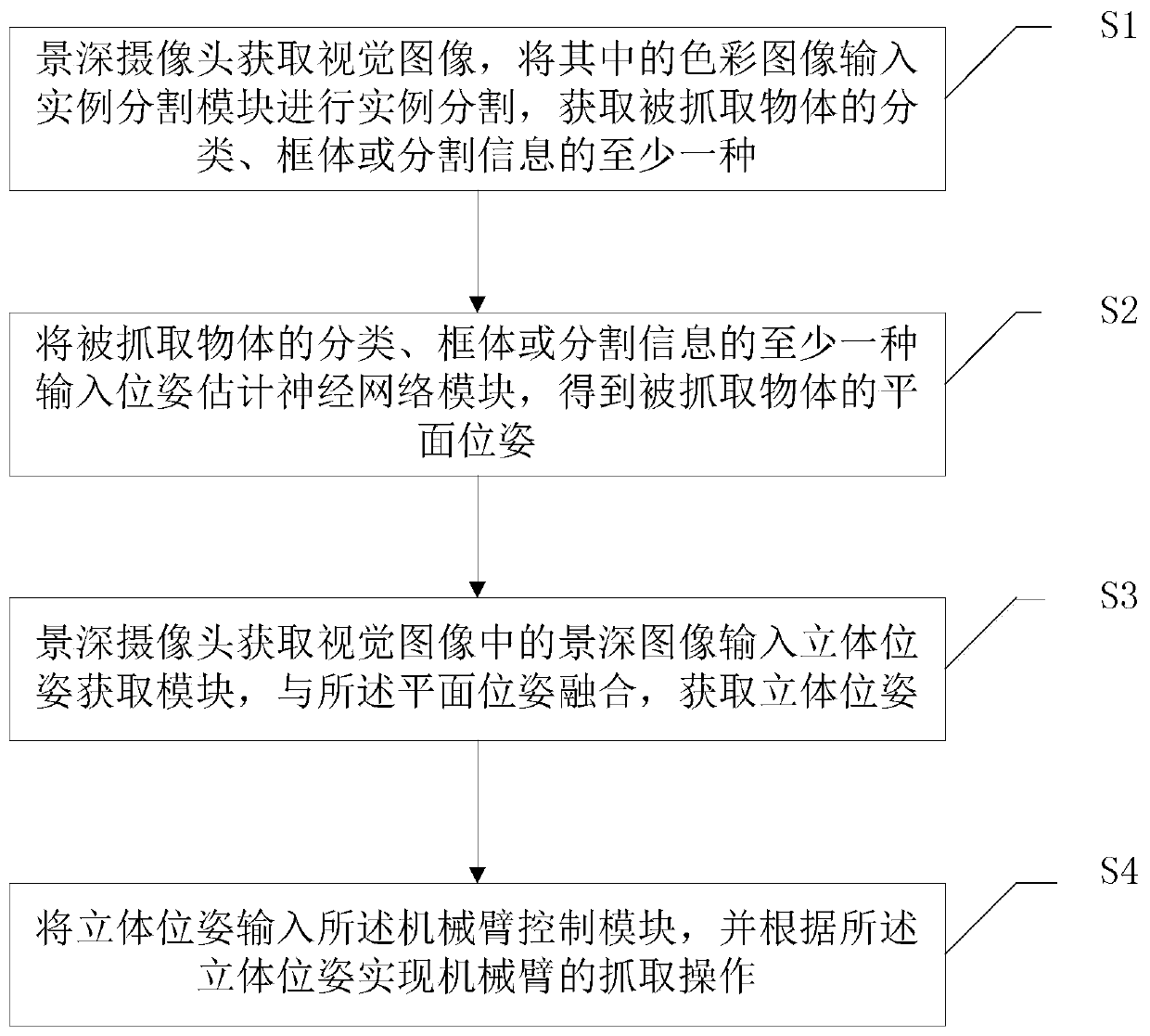
[0034] The present disclosure provides a robotic arm visual grasping system and method based on a self-supervised learning neural network, including acquiring a visual image of an object to be grasped, and neural network regression to estimate the approximate position of the grasped object and the precise estimation of the grasping attitude. The convolutional neural network first recognizes the object and regresses to obtain the approximate outline position of the grasped object in the visual image. Then, sample different grasping positions and grasping angles in the object outline, score each position and angle after passing through the fully connected layer of the neural network, and use the position and angle corresponding to the highest score as the selected position and angle for the robotic arm to grasp the object. Precise gesture. Among them, the weight of the neural network is obtained by the self-supervised training of the manipulator, considering the actual density d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More