

Fully-driven five-finger dexterous hand structure and control system
A control system and structure control technology, applied in the field of robots, can solve the problems of insufficient flexibility of dexterous hands, reduced bionic performance, complicated control system, etc., and achieve the effect of convenient disassembly and installation of steering gear, scientific and reasonable structure, and improved flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
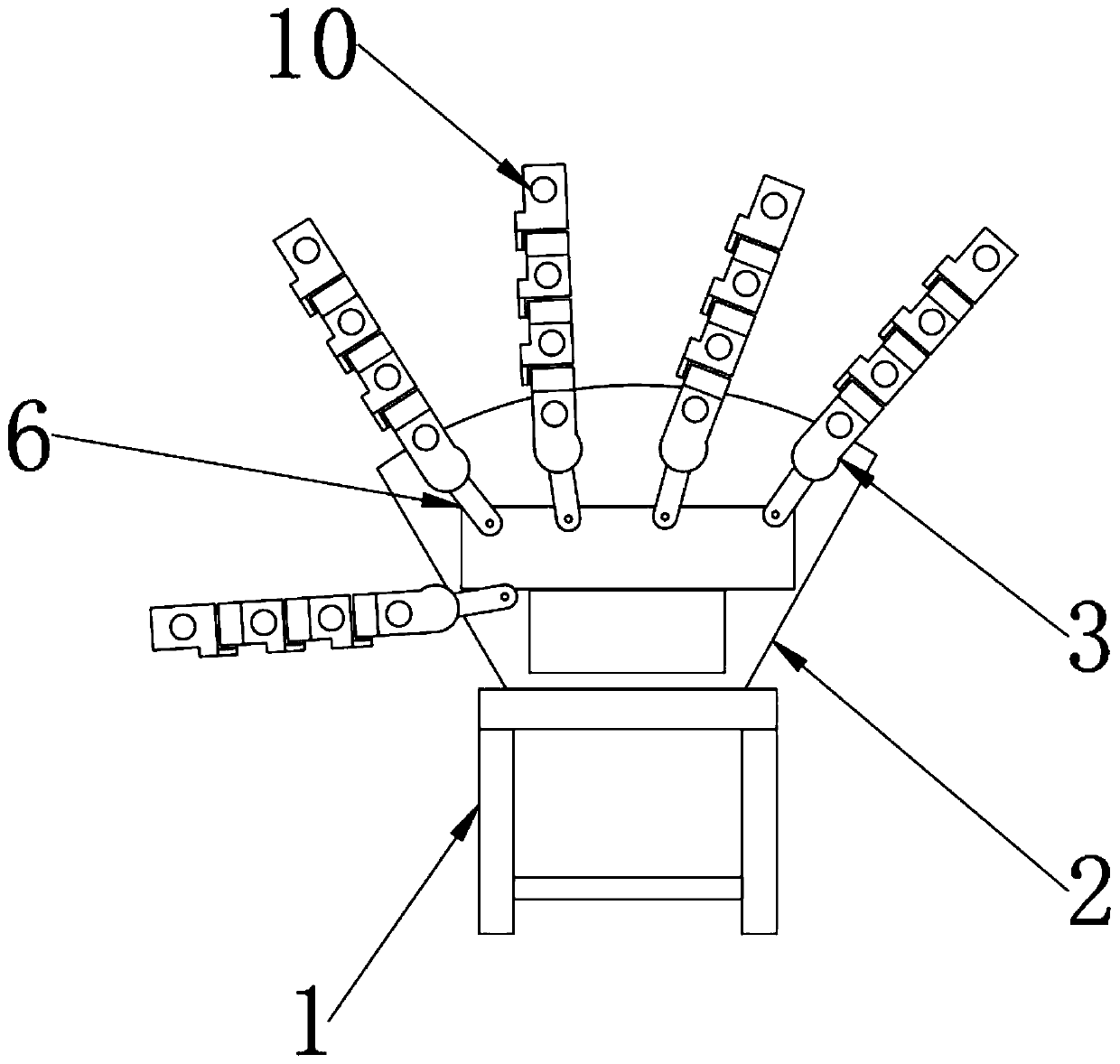
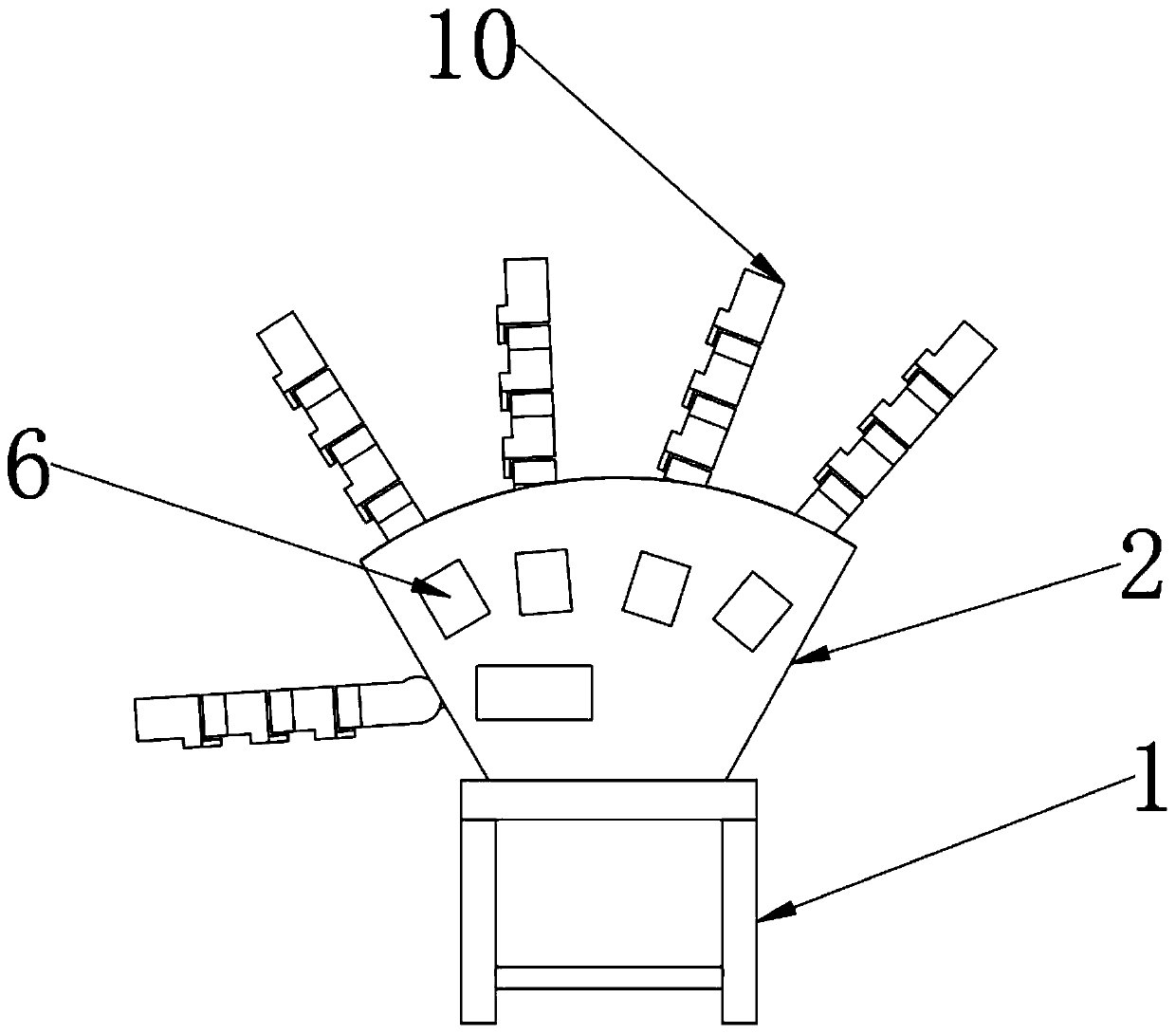
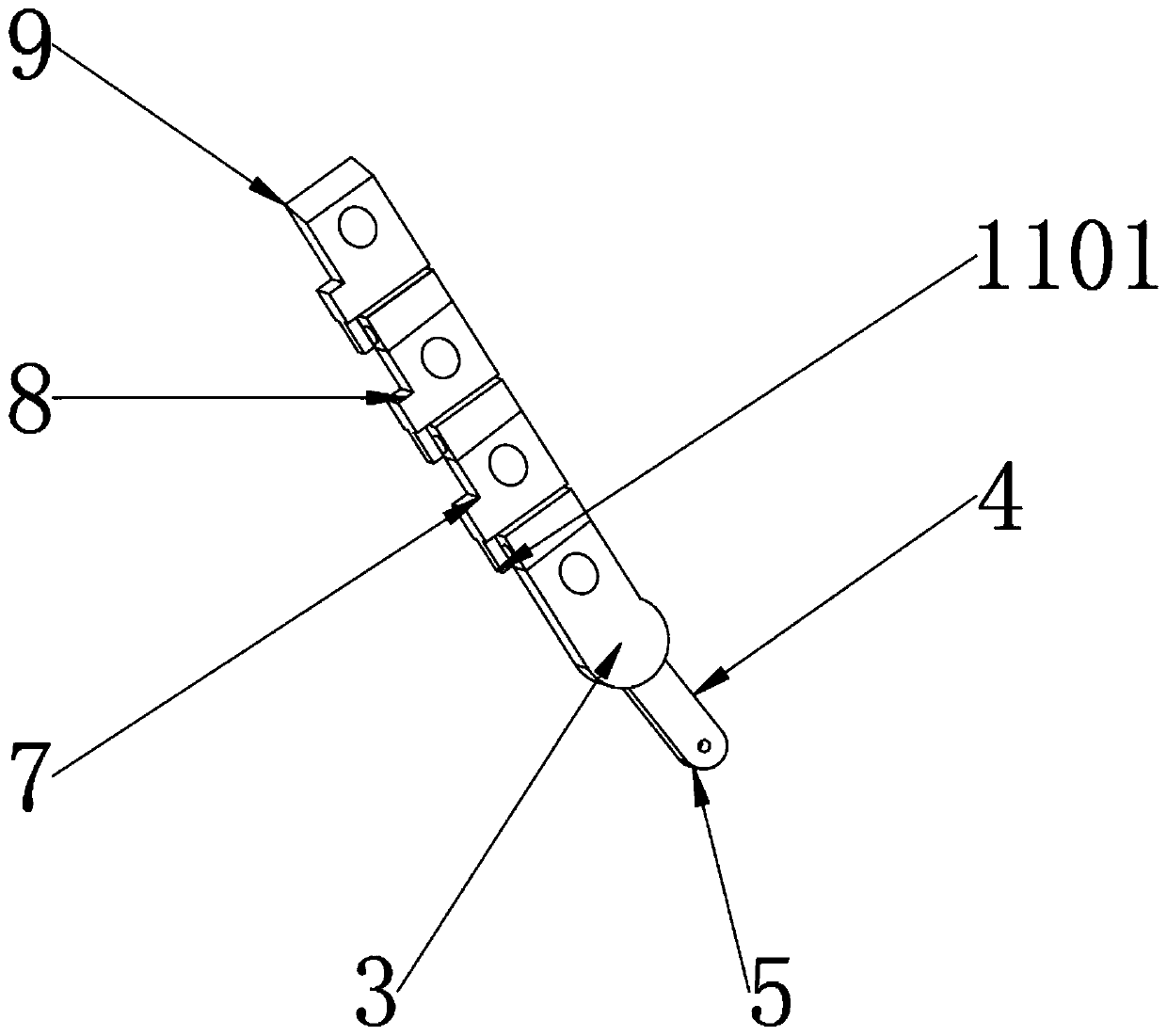
[0036] Example: such as Figure 1-8 As shown, the present invention provides a technical solution, a fully driven five-finger dexterous hand structure, including a fixed base 1, a palm 2 is installed on the top of the fixed base 1, and a metacarpal bone 3 is installed on one side of the palm 2, and the number of metacarpal bones 3 is five , the proximal phalanx 7 is mounted on one end of the metacarpal 3, the middle phalanx 8 is mounted on one end of the proximal phalanx 7, the distal phalanx 9 is mounted on one end of the middle phalanx 8, between the metacarpal 3 and the proximal phalanx 7, between the proximal phalanx 7 and Joint components 11 are installed between the middle phalanx 8 and between the middle phalanx 8 and the distal phalanx 9;
[0037] The joint assembly 11 includes a bump 1101, a rotating shaft 1102, a rotating steering gear 1103 and a fixing plate 1104;
[0038]Proximal phalanx 7, middle phalanx 8, and distal phalanx 9 are all equipped with protrusions 1...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More