Position tracking method for autonomous vehicle
A technology for unmanned vehicles and vehicles, applied in the field of position tracking of unmanned vehicles, can solve problems such as the inability to give the precise position and speed information of the carrier, the hidden dangers of safe driving of unmanned vehicles, and the difficulty of precise positioning of the carrier, etc. Real-time tracking, filtering stability and convergence, high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
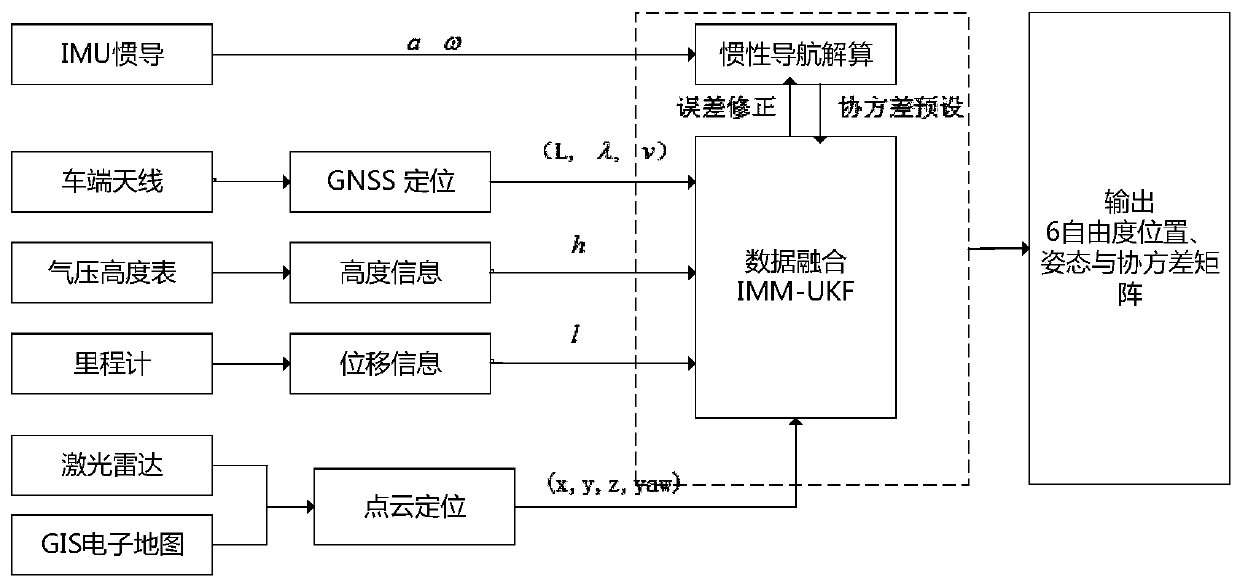
[0050]The embodiment of the present invention provides a multi-model interactive intelligent filtering unmanned vehicle tracking system, including: IMU inertial navigation, vehicle-side antenna, altitude barometer, odometer, GIS electronic map, laser radar, data fusion module, and data output module . Among them, the IMU, antenna, barometer, odometer and laser radar as sensors are electrically connected to the data fusion module with the auxiliary means GIS electronic map, and the data fusion module is electrically connected to the data output module to lay the foundation for the decision-making and execution of unmanned vehicles. The whole system is powered by the on-board computer and communicates through the GPRS network. The system structure is shown as figure 1 shown.
[0051] The IMU inertial navigation and the vehicle-end antenna as the main modules providing integrated navigation information sources can complement each other. As a common civilian navigation method, in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More