

Coordinating manipulator-based adaptive neural network synchronous robust controller design method
A robust controller and neural network technology, applied in the field of adaptive neural network synchronous robust controller, can solve problems such as uncertainties in the standard parameters of a manipulator base, and achieve the effects of reducing production costs and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific implementation steps.
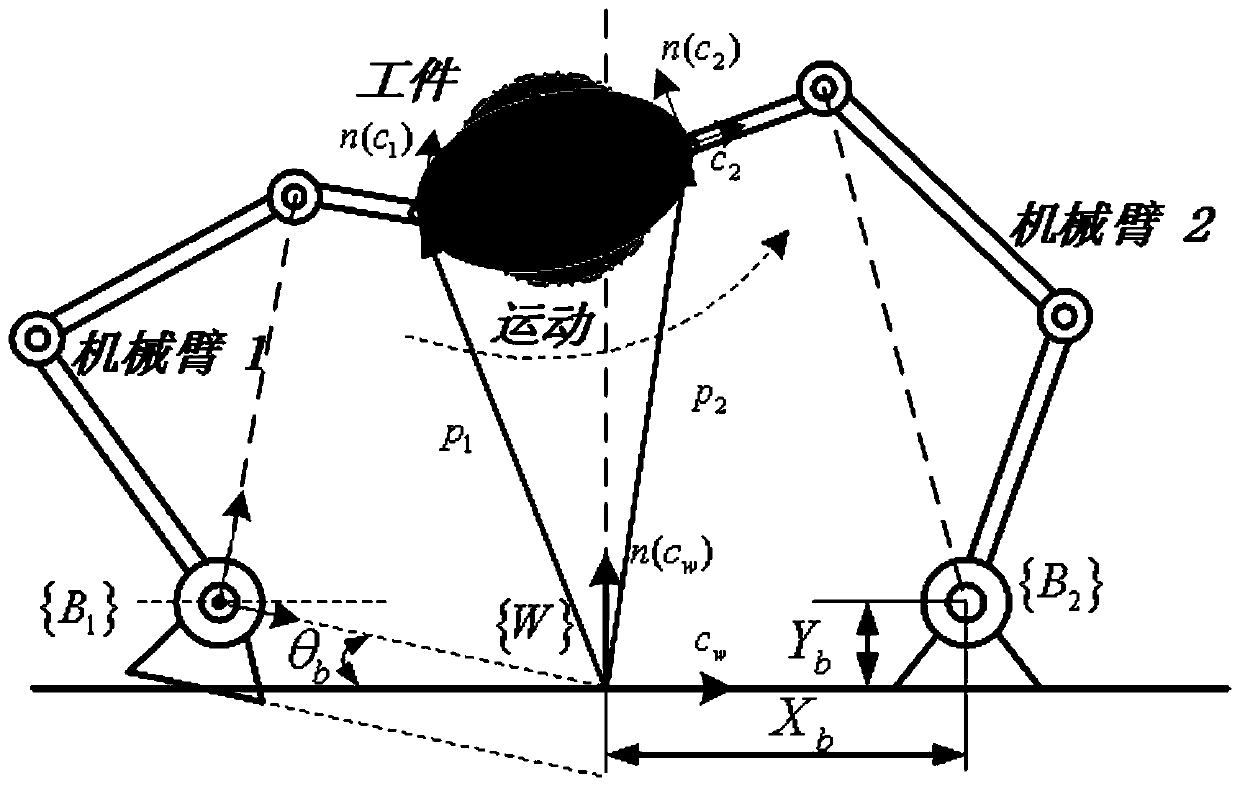
[0028] refer to figure 1 , select the scene of coordinated clamping of dual robotic arms to implement the technical solution. Both robotic arms are composed of three parallel degrees of freedom in the plane, which has certain redundancy. Such as figure 1 As shown, the mechanical arms on both sides have the same physical parameters, where the moment of inertia I of the connecting rod of the mechanical arm 1 = I 2 =0.5kg·m 2 , the mass of the connecting rod of the manipulator m 1 = m 2 = m 3 = 1.5kg, the length of the connecting rod l 1 = l 2 =0.6m,l 3 = 0.2m. The moment of inertia of the clamped workpiece is 0.3kg m 2 , the mass of the workpiece is 1.5kg, and the radius of the workpiece is 0.2m.
[0029] refer to figure 1 , the uncertain translation and angle parameters of the base mark are reflected in X b , Y ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More