

Intelligent electric vehicle path tracking model prediction control method
A model predictive control, intelligent electric vehicle technology, applied in the field of control, can solve the problems of prone to accidents, few control systems, and inability to control vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The invention relates to a control method for path tracking of an intelligent electric vehicle, and more specifically, the invention relates to a path tracking control method for an electric vehicle that can guarantee uneven limit road conditions.
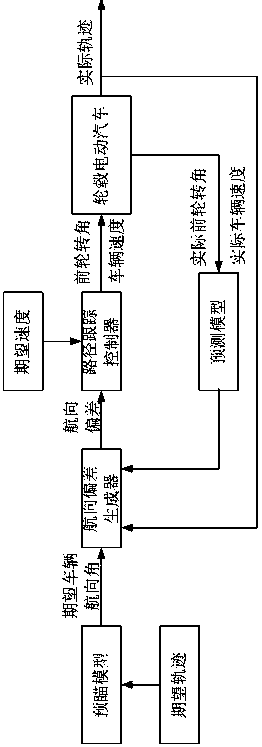
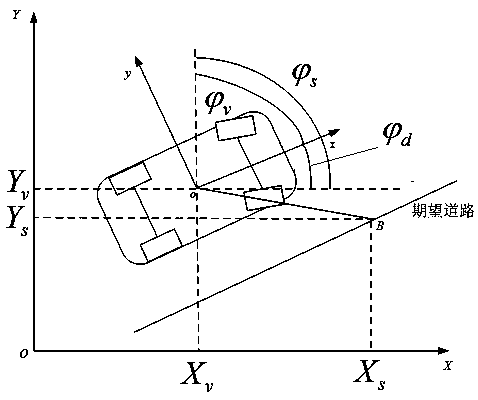
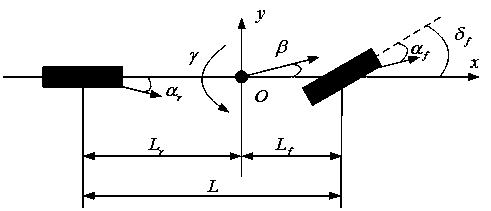
[0092] The invention establishes a vehicle nonlinear dynamics model considering extreme working conditions, and then designs a vehicle path tracking controller based on the optimal preview theory and model predictive control algorithm to realize the effect of electric vehicle path tracking, including path following, vehicle speed follow. The dynamic model established considering the extreme working conditions can track the path more accurately, while ensuring the safety of the vehicle and preventing the vehicle from rolling over and flicking. The model predictive control method can effectively deal with multi-objective complex optimization control problems, and the explicit processing constraints. The model predictive contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More