

Hexapod robot and planning method for foot end track
A hexapod robot and robot technology, which is applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve the problems of ground damage and huge energy consumption, and achieve the effect of efficient movement, simple realization, and structural strength requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The purpose of the invention of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments.
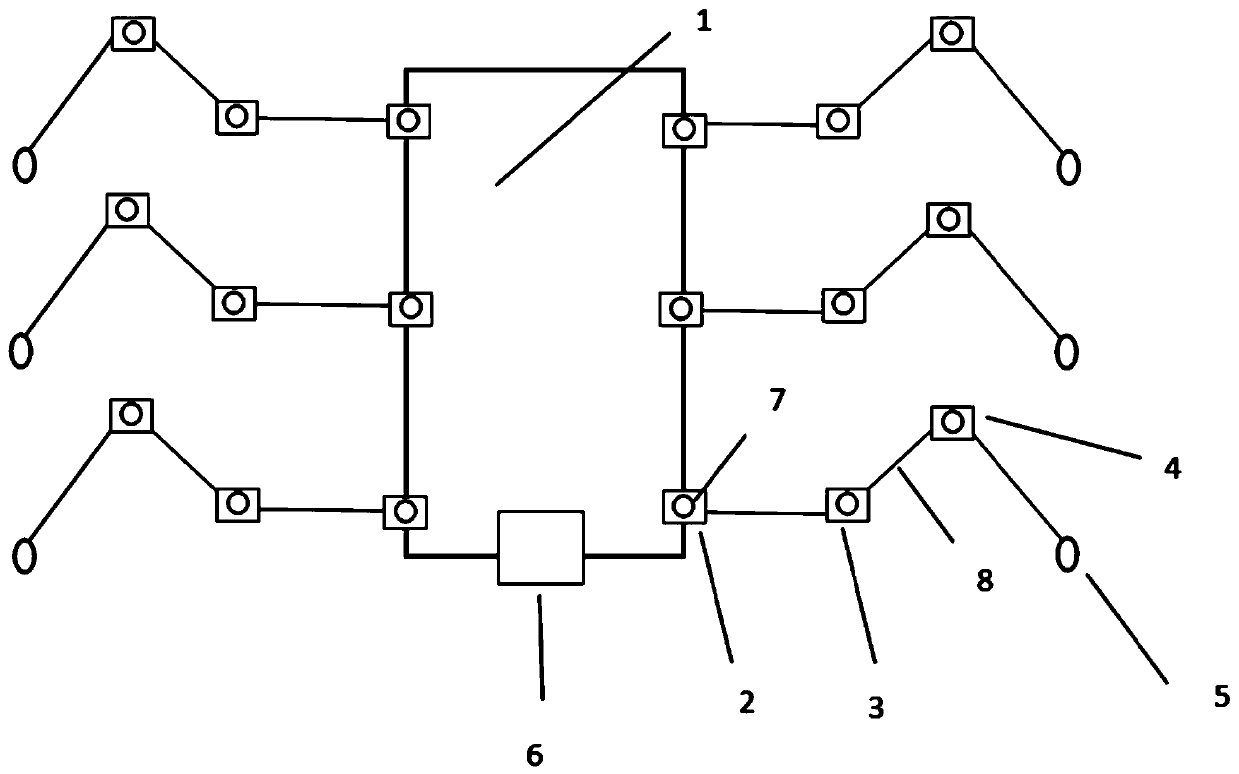
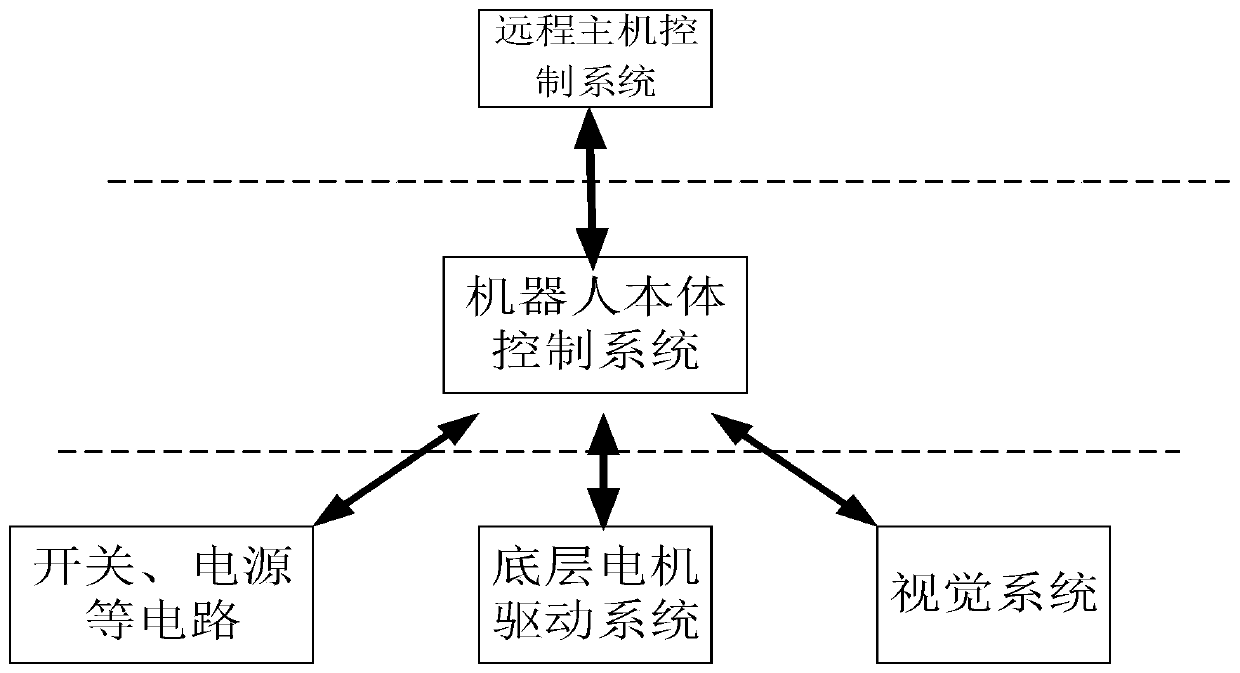
[0041] A hexapod robot, including a body 1, six legs distributed on the body 1, a hardware system and a software system; each leg of the robot is composed of three joints and connecting parts thereof, and the connecting parts include a steel plate 8 and a screw 7 The three joints from top to bottom are hip joint 2, knee joint 3 and ankle joint 4; the ends of the six legs are respectively provided with buffer structures 5; the robot hardware system includes a remote host control system, a vision system 6, and a robot body The control system and the underlying motor drive system of the robot; the software system is implemented based on the ROS robot ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More