

Integrated navigation information fusion method based on interactive multiple models
A technology of interactive multi-model and integrated navigation, which is applied in the field of multi-sensor data fusion of integrated navigation based on interactive multi-model, can solve the problems of error navigation accuracy, drop, and poor long-term stability, and achieve the goal of reducing error information and improving navigation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
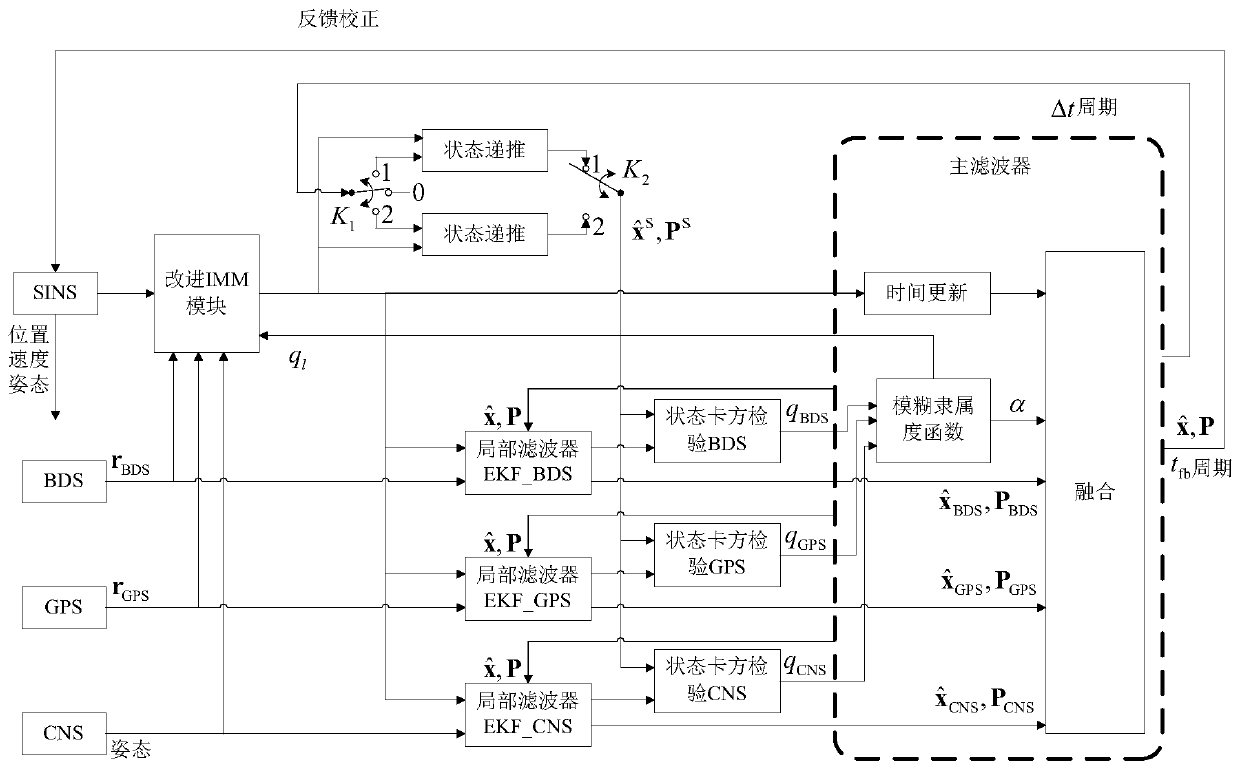
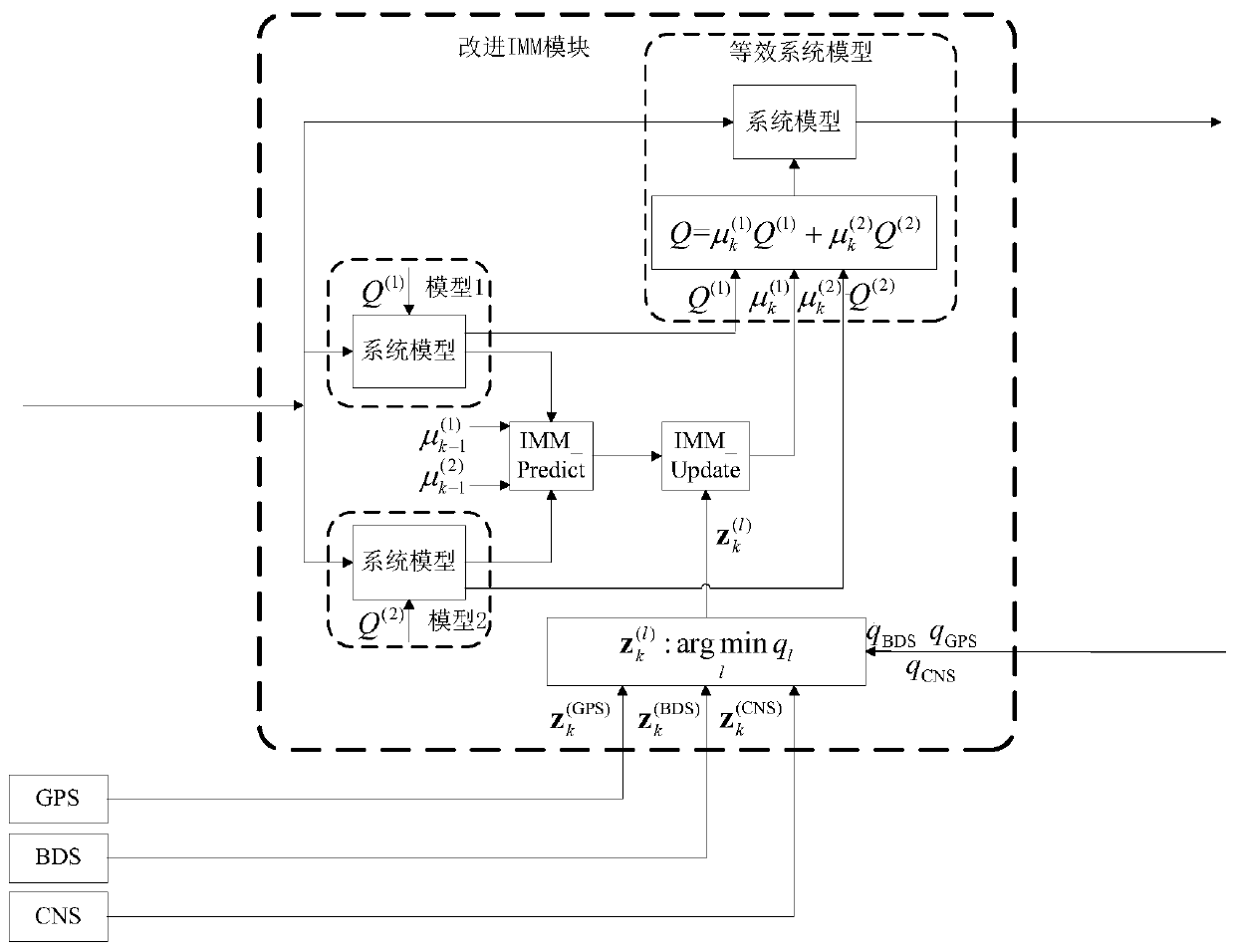
[0054] The basic structure of the present invention is as figure 1 As shown, the system model is constructed with SINS, and the characteristics of the inertial measurement unit are selected with an appropriate Q (1) and Q (2) As the two subsystem models of this method, the noise statistical characteristics are modeled, respectively, and the determined system model constitute the system sub-model M (1) and M (2) , run these two models independently, after two modules of interactive multi-model prediction and interactive multi-model update, the weight coefficient of the subsystem model at time k is obtained j=1, 2 represents the serial number of the corresponding subsystem model. Statistical Characteristics of Modeling Noise in Equivalent System Model denoted as Q (1) and Q (2) The weighted average sum of , the weighting coefficient at time k is given by Sure. will equivalently model noise statistics Constitute an equivalent system model with the determined system m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More