

Open loop optimization method and system based on SLAM mapping
An optimization method and map technology, applied in the field of navigation, can solve the problems of cumulative errors that the robot cannot close the loop and the failure of map construction, etc., and achieve the effect of solving the problem of multi-map coordinate fusion, increasing robustness, and ensuring the coordinate system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 4
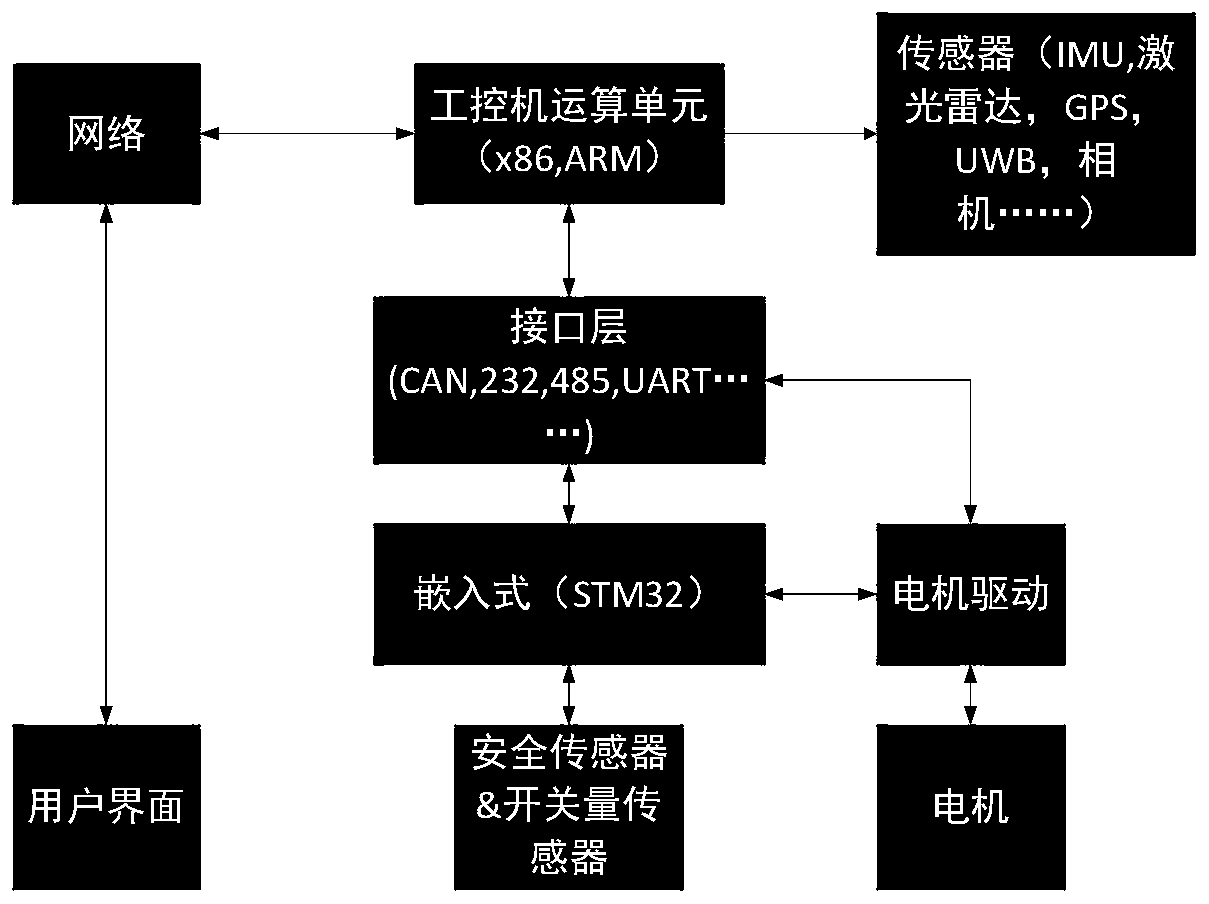
[0103] The embodiment of this specification provides a robot, the robot includes a robot body, the robot body is equipped with a laser radar sensor and a sensor for obtaining external absolute positioning information; the robot body can be a mechanical device of an ordinary robot.
[0104] Both the data detected by the lidar sensor and the external absolute positioning information are transmitted The computing processing unit can receive sensor information to construct and correct maps.
[0105] The local environment map information and absolute position information detected by the lidar, and the absolute position information received by the observation sensor are added to the time stamp information and then sent to the operation processing unit.
[0106] Since the absolute positioning information is not necessarily continuous, when the absolute positioning information is not received, the calculation processing unit only receives the local environmental map information of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More