

Inverse Salient Axial Parallel Multiphase Permanent Magnet Fault Tolerant Motor
A permanent magnet fault-tolerant, salient-pole technology, applied to synchronous motors with stationary armatures and rotating magnets, synchronous machine parts, magnetic circuit rotating parts, etc., can solve the mutual constraints between normal operating performance and fault tolerance, etc. problems, achieve excellent normal operation performance and fault-tolerant operation capability, reduce permanent magnet flux, and improve efficiency distribution characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
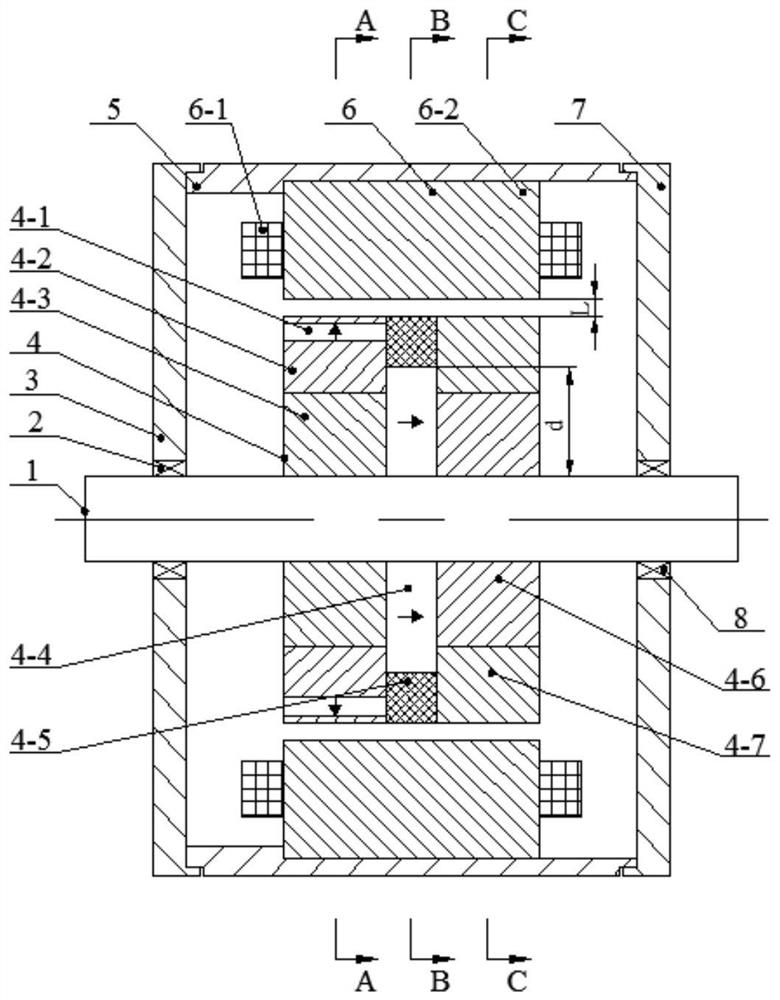
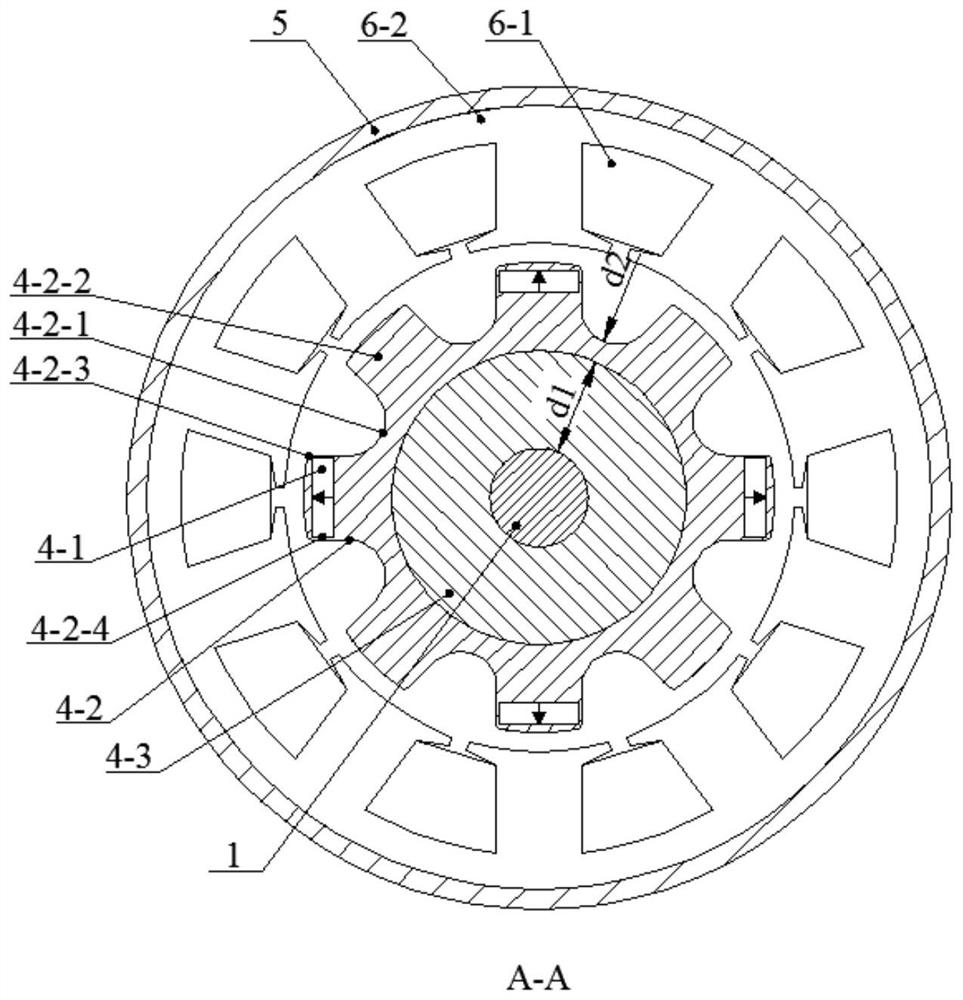
[0025] Specific implementation mode one: the following combination Figure 1 to Figure 4 Describe this embodiment, this embodiment includes a rotating shaft 1, a first bearing 2, a left end cover 3, a rotor 4, a casing 5, a stator 6, a right end cover 7 and a second bearing 8,
[0026] The stator 6 is fixed on the inner side wall of the casing 5, the rotor 4 is fixed on the rotating shaft 1, and the rotating shaft 1 is respectively rotated and fixed on the left end cover 3 and the right end cover 7 through the first bearing 2 and the second bearing 8, and the left end cover 3 and the right end cover The cover 7 is respectively fixed on the left and right ports of the casing 5, and there is a radial air gap L between the rotor 4 and the stator 6;
[0027] The stator 6 is composed of a stator core 6-2 and an m-phase stator winding 6-1. The stator winding 6-1 is a multi-phase fractional slot concentrated winding, and the windings of different phases meet the electrical, magnetic,...
specific Embodiment approach 2
[0042] Embodiment 2: The difference between this embodiment and Embodiment 1 is that a short-circuit fault occurs in a certain phase winding in the m-phase stator winding 6-1, and the faulty phase winding is connected to the fault phase winding through a multi-phase full-bridge inverter. end short circuit, and simultaneously control the current in the remaining m-1 phase normal windings in the stator winding 6-1, and control the magnetic states of the p first permanent magnets 4-1 and the p second permanent magnets 4-8, Reduce the operating points of the p first permanent magnets 4-1 and p second permanent magnets 4-8, or even make them magnetized in reverse, reduce the size of the permanent magnetic field in the air gap, and then suppress the failure phase winding short circuit current.
Embodiment
[0044] Taking a five-phase motor as an example, in the normal operating state, the direct axis current i d During =0 control, the stator windings A, B, C, D, E of its stator 6 communicate with the amplitude as I m , the angular frequency is ω, and the initial phase angle is The five-phase symmetrical sinusoidal current i A , i B , i C , i D , i E ,Right now
[0045]
[0046]
[0047]
[0048]
[0049]
[0050] Assuming that a short-circuit fault occurs in the A-phase winding, the remaining four-phase normal windings are controlled to pass the following current:
[0051]
[0052]
[0053]
[0054]
[0055] Among them, the intermediate variable
[0056]
[0057] In the formula: R 0 is the short-circuit phase winding resistance; L 0 is the inductance of the short-circuit phase winding; N is the number of turns of the motor winding; k dp is the motor winding factor; Φ pm-D is the permanent magnetic flux coupled with the short-circuit pha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More