

Robot double-wire four-pulse novel welding method
A welding method and pulse welding technology, applied in welding equipment, welding accessories, arc welding equipment, etc., can solve the problems of reducing arc force and large spatter, and achieve the effect of controlling heat input and improving joint performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
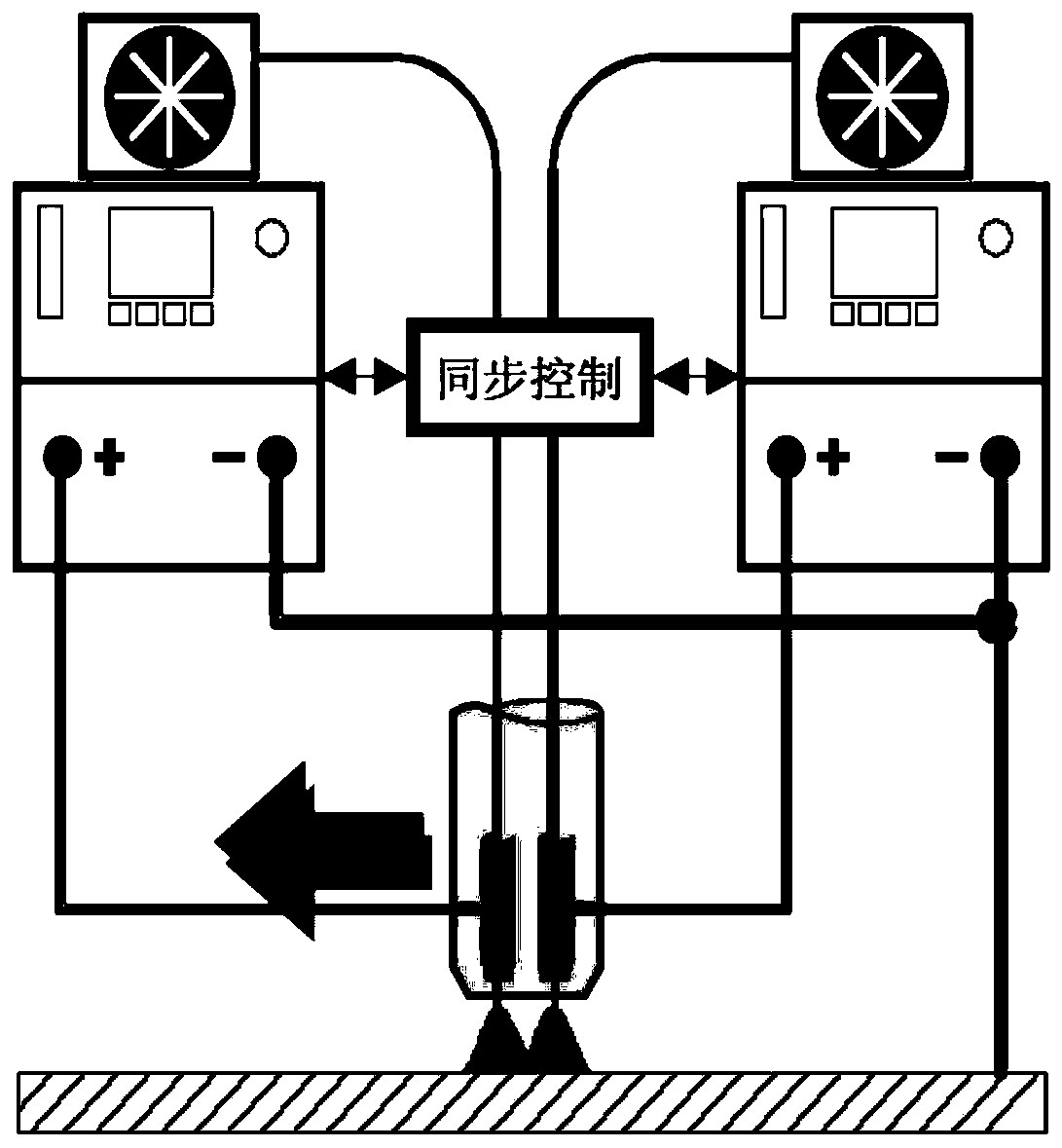
[0028] This embodiment proposes a new welding method for a robot with two wires and four pulses. The robot includes a control unit, a wire feeding unit, two pulse welding power sources communicating with each other, and a welding torch. The method includes that the wire feeding unit connects two welding wires Arranged forward and backward at a certain angle toward the welding site; the control part controls the two pulse welding power sources so that the current provided to the forward wire is greater than the current provided to the rear wire; and the control part also controls the feeding The wire unit provides the same or different wire feeding speeds for the front wire and the rear wire, and controls the pulse welding power supply to use four independent pulses to provide welding current to the welding wire.
[0029] Wherein said control component is a single-chip microcomputer system. The materials, diameters, and wire feeding speeds of the two welding wires in this embod...
Embodiment 2
[0031] This embodiment proposes a new welding method for a robot with two wires and four pulses. The robot includes a control unit, a wire feeding unit, two pulse welding power sources communicating with each other, and a welding torch. The method includes that the wire feeding unit connects two welding wires Arranged forward and backward at a certain angle toward the welding site; the control part controls the two pulse welding power sources so that the current provided to the forward wire is greater than the current provided to the rear wire; and the control part also controls the feeding The wire unit provides the same or different wire feeding speeds for the front wire and the rear wire, and controls the pulse welding power supply to use four independent pulses to provide welding current to the welding wire.
[0032] Wherein said control component is a single-chip microcomputer system. The materials, diameters, and wire feeding speeds of the two welding wires in this embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More