

Robot visual guide positioning algorithm
A robot vision, guided positioning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to meet offset material pose correction, and achieve improved material grabbing efficiency, production rhythm, and cost savings. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
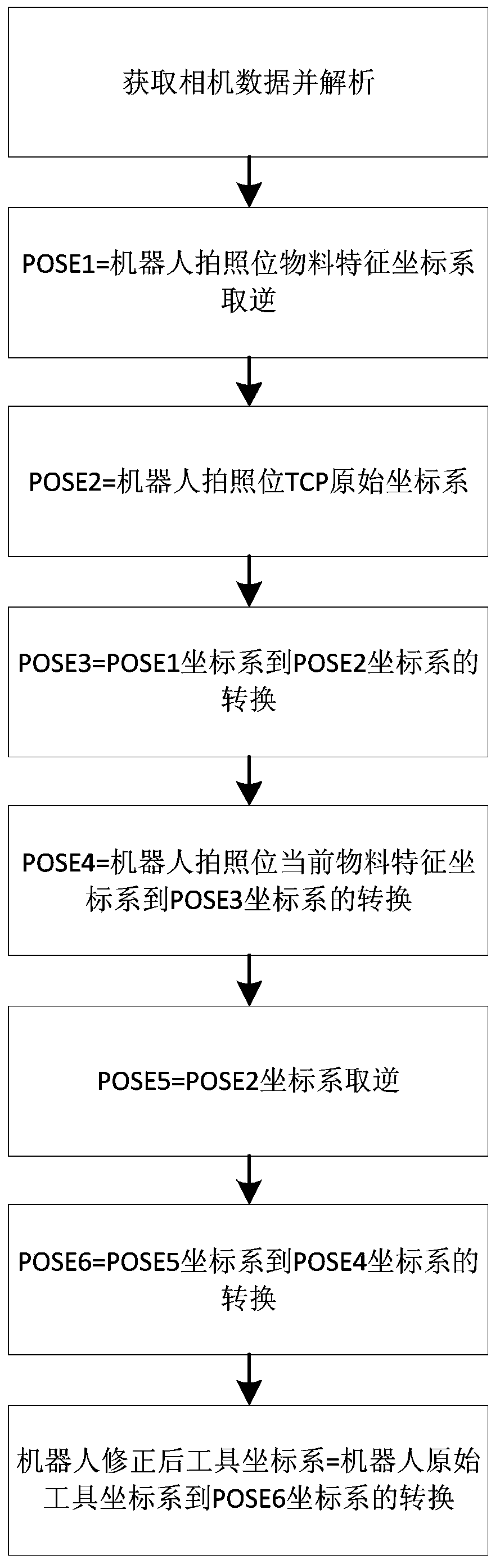
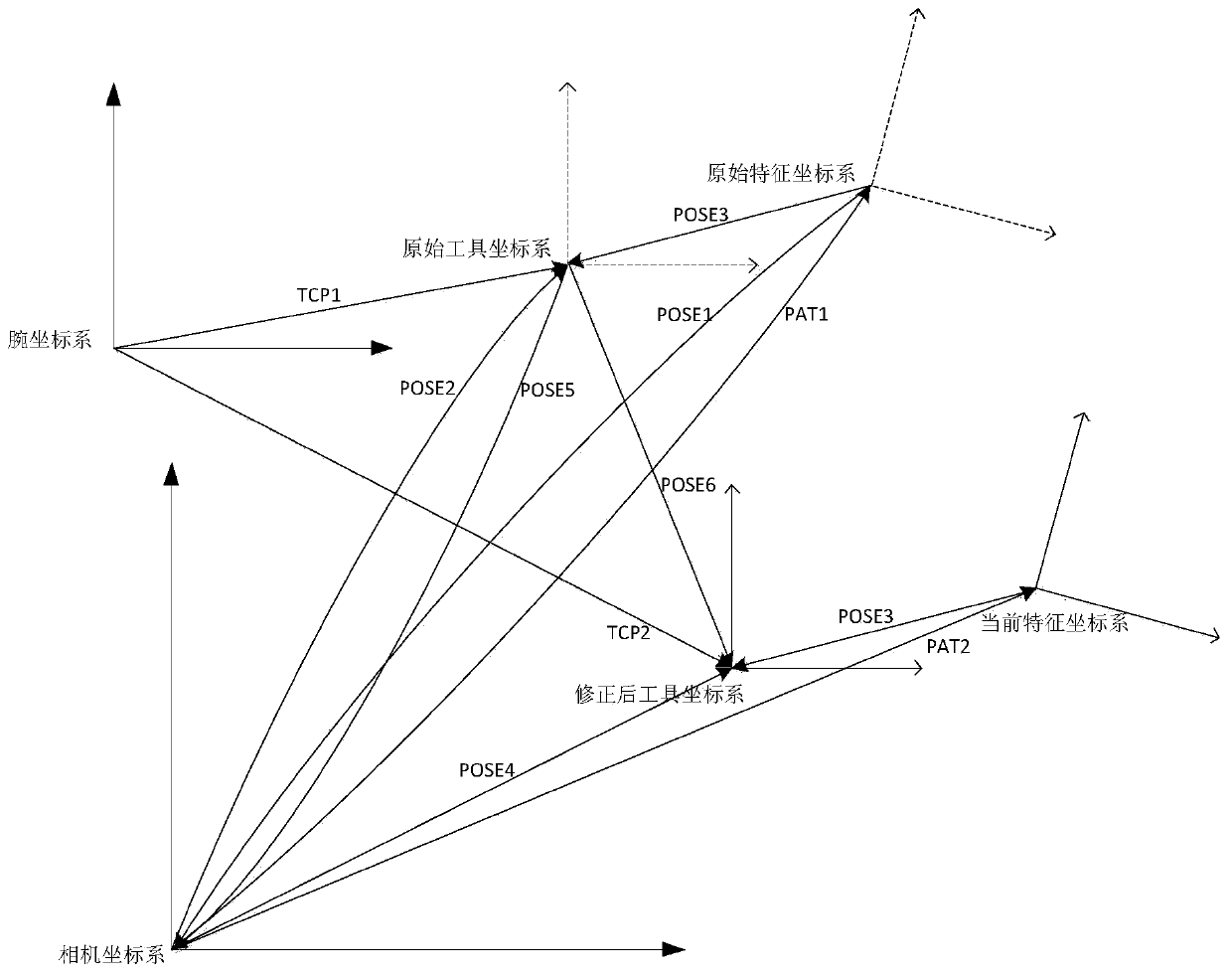
[0028] refer to figure 1 , figure 2 , image 3 , Figure 4 with Figure 5 , a kind of robot visual guidance positioning algorithm of the present invention, comprises the following steps:
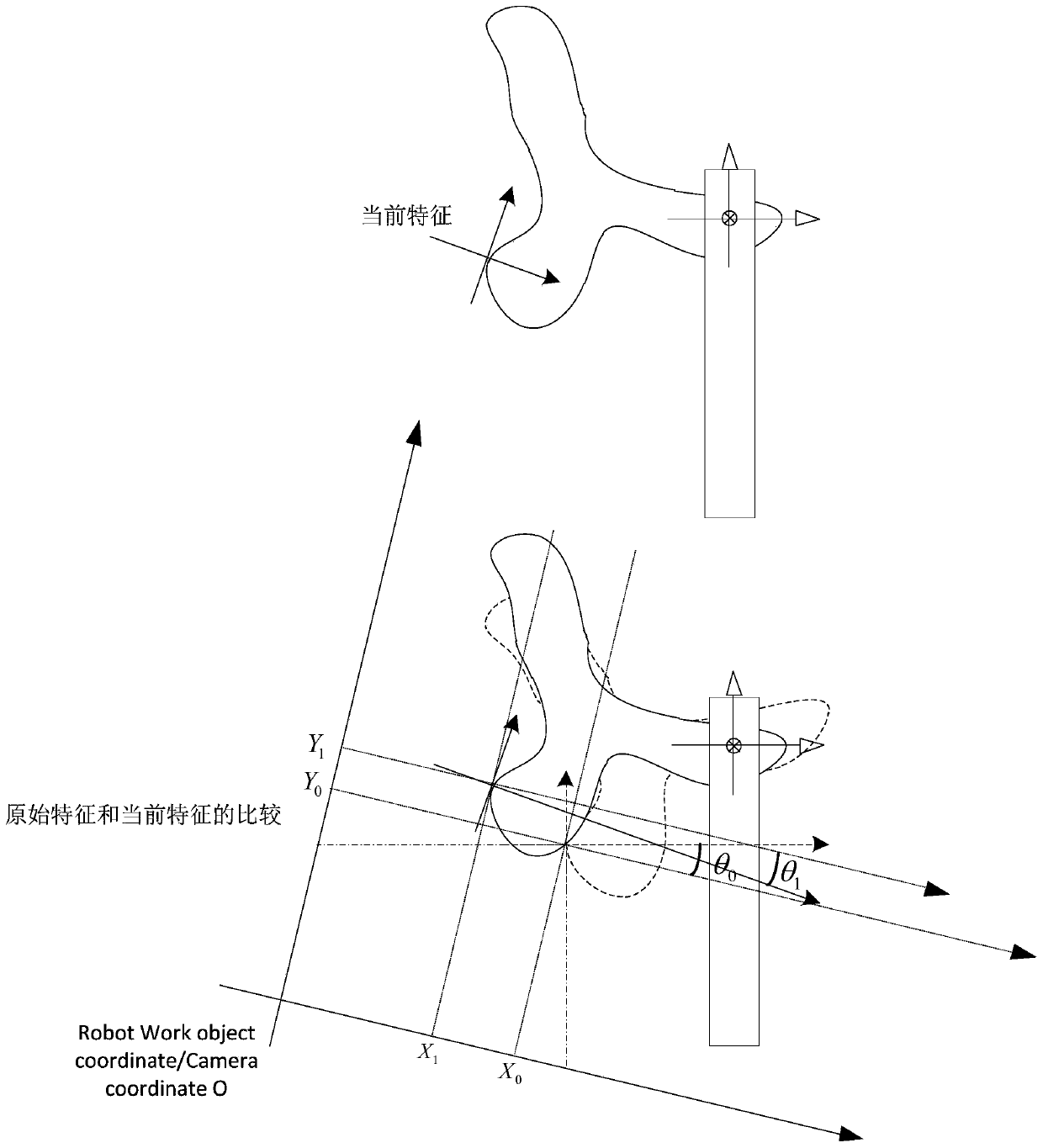
[0029] Step s1: The robot grabs the material. At this time, the pose of the material relative to the fixture is deviated from the pose of the original material relative to the fixture;
[0030] Step s2: The robot grabs the material, places it under the smart camera, and takes pictures;
[0031] Step s3: The camera calculates the pose of the current material in the camera coordinate system, and transmits the pose data of the original material and the current material to the robot;
[0032] Step s4: The robot undergoes the conversion of the coordinate system pose and corrects the robot TCP;
[0033] Step s5: The robot uses the corrected TCP to accurately place the material into the precise position of the mold.
[0034] Preferably, the step s5 includes the following steps: step s51: ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More