

Dual-mode parallel vehicle trajectory tracking driving system and method based on predictive control
A predictive control and vehicle trajectory technology, applied in the field of dual-mode parallel vehicle trajectory tracking driving systems based on predictive control, can solve the problems of inaccurate modeling and inability to interpret a large amount of data based on neural networks, so as to enhance fault tolerance and improve safety. stability and reliability, and the effect of improving stability and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
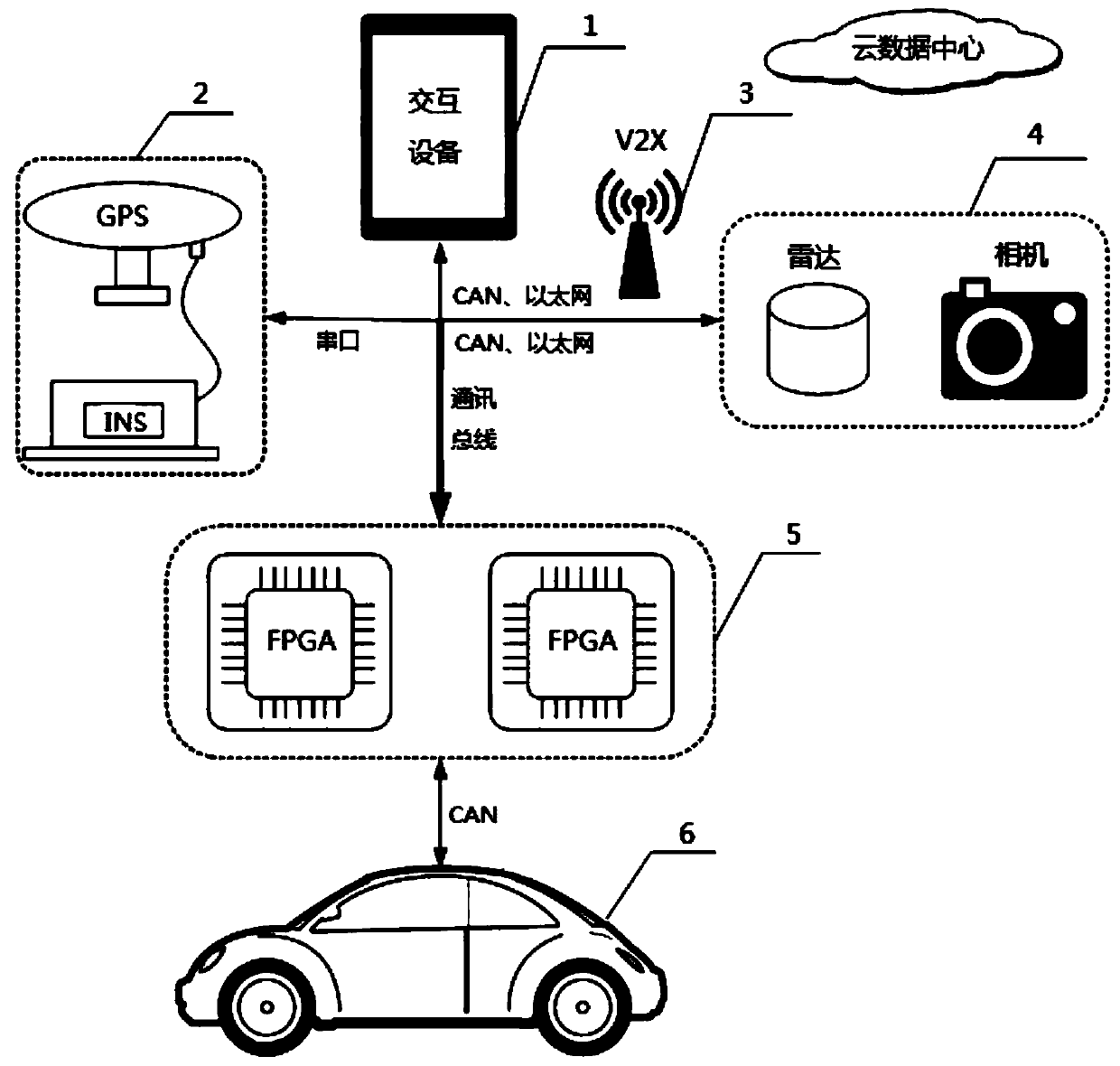
[0035] Such as figure 1 As shown, a dual-mode parallel vehicle trajectory tracking system based on predictive control, including:
[0036] Human-computer interaction unit, with human-computer interaction function, realizes the selection of target location, speed selection, display of planned route, display of traffic information and vehicle information;
[0037] Combined positioning unit, real-time information on the position and attitude of the self-driving car;
[0038] The communication unit realizes all communication between the human-computer interaction unit, the comprehensive information perception unit, the combined positioning unit, the parallel on-board processing dual unit and the execution unit;
[0039] The integrated information perception unit provides real-time traffic information around the self-driving car;
[0040] Parallel on-board processing dual units, using two parallel and independent computing units, respectively run two different sets of algorithms,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More