

Weight adaptive pose estimation method based on point-line fusion
A pose estimation and self-adaptive technology, applied in computing, image analysis, image enhancement and other directions, can solve the problems of uneven feature distribution, uneven feature distribution, affecting the effect of pose estimation, etc., to improve the description accuracy, The effect of improving descriptiveness, improving adaptability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the embodiments and accompanying drawings. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
[0028] The present invention provides a kind of weight adaptive pose estimation method (abbreviation method) based on point-line fusion, it is characterized in that the method comprises the following steps:
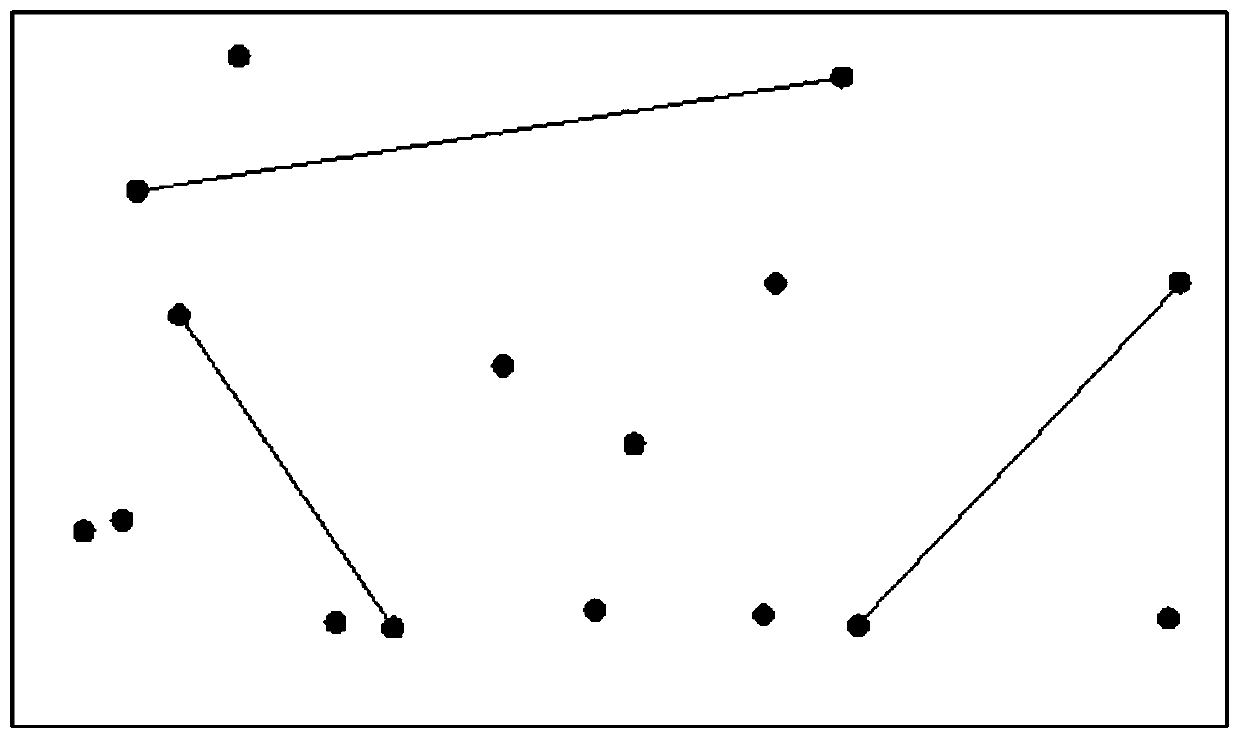
[0029] Step 1. Use the binocular camera to collect images to obtain a continuous image sequence: use the binocular camera to collect scene information in the environment, obtain real-time environmental information, and form a continuous image sequence;
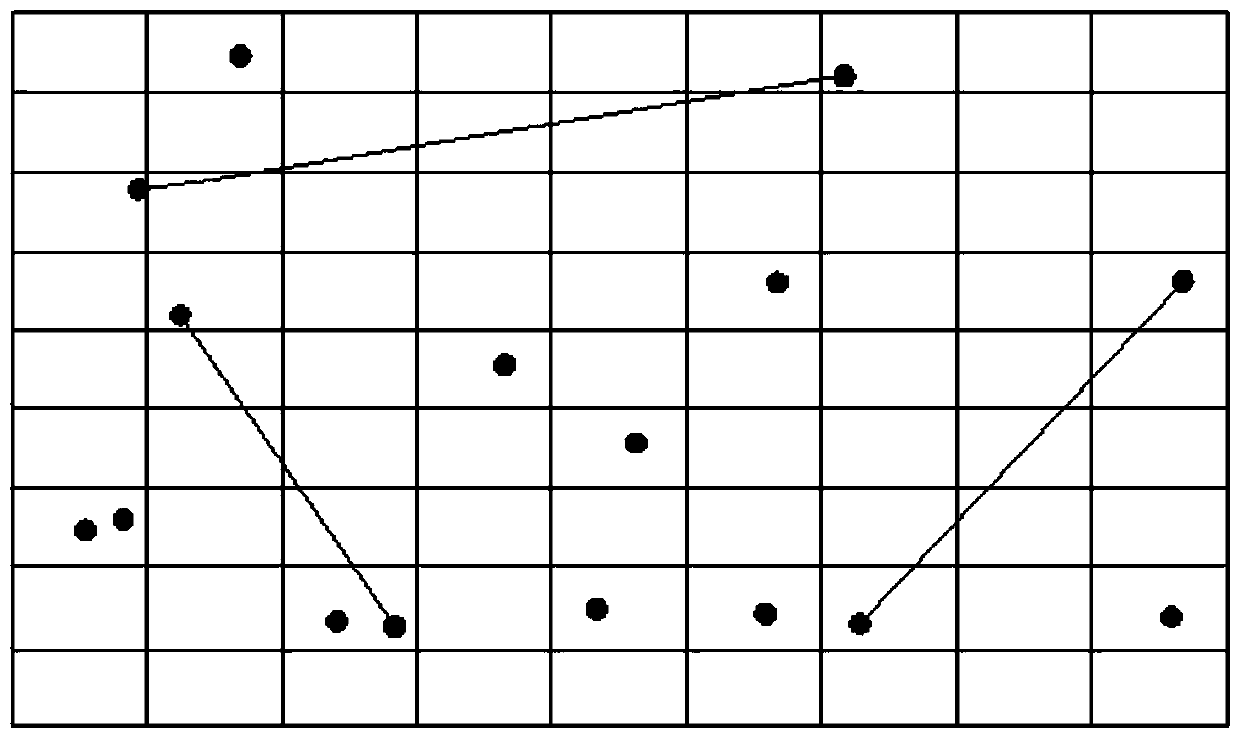
[0030] Step 2: Perform feature extraction and processing on the image to obtain the total number of midpoint features and line feature endpoints n in each frame f and its pixel coordinate set C j :
[0031] (1) Use the ORB alg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More