Bionic S-shaped moving robot
A mobile robot and bionic snake technology, applied in the field of robots, can solve the problems of reducing the overall motion speed, reducing the joint motion, and complex control, and achieves the effects of improving the moving efficiency, amplifying the action distance, and simple and accurate control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
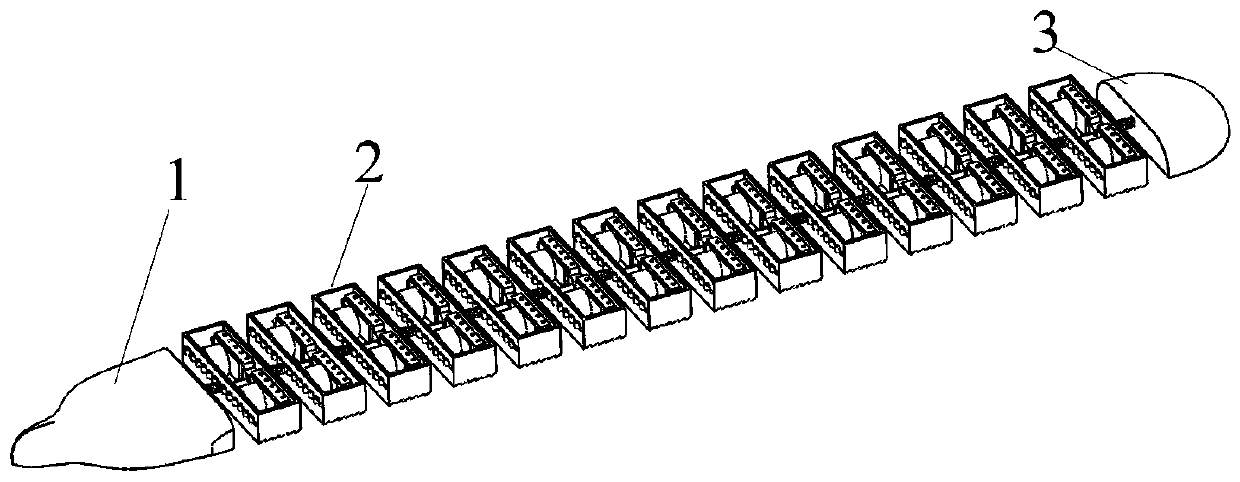
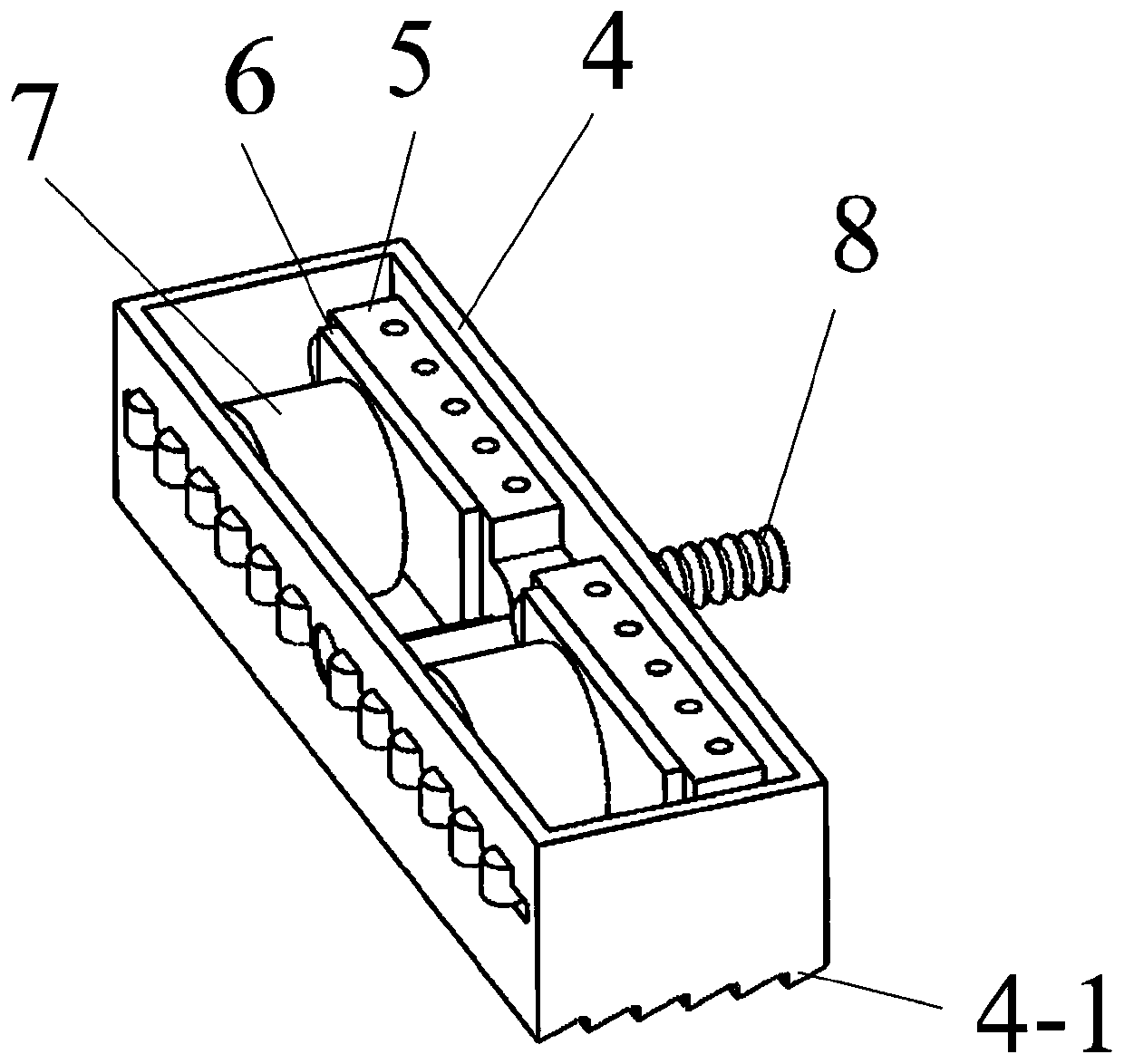
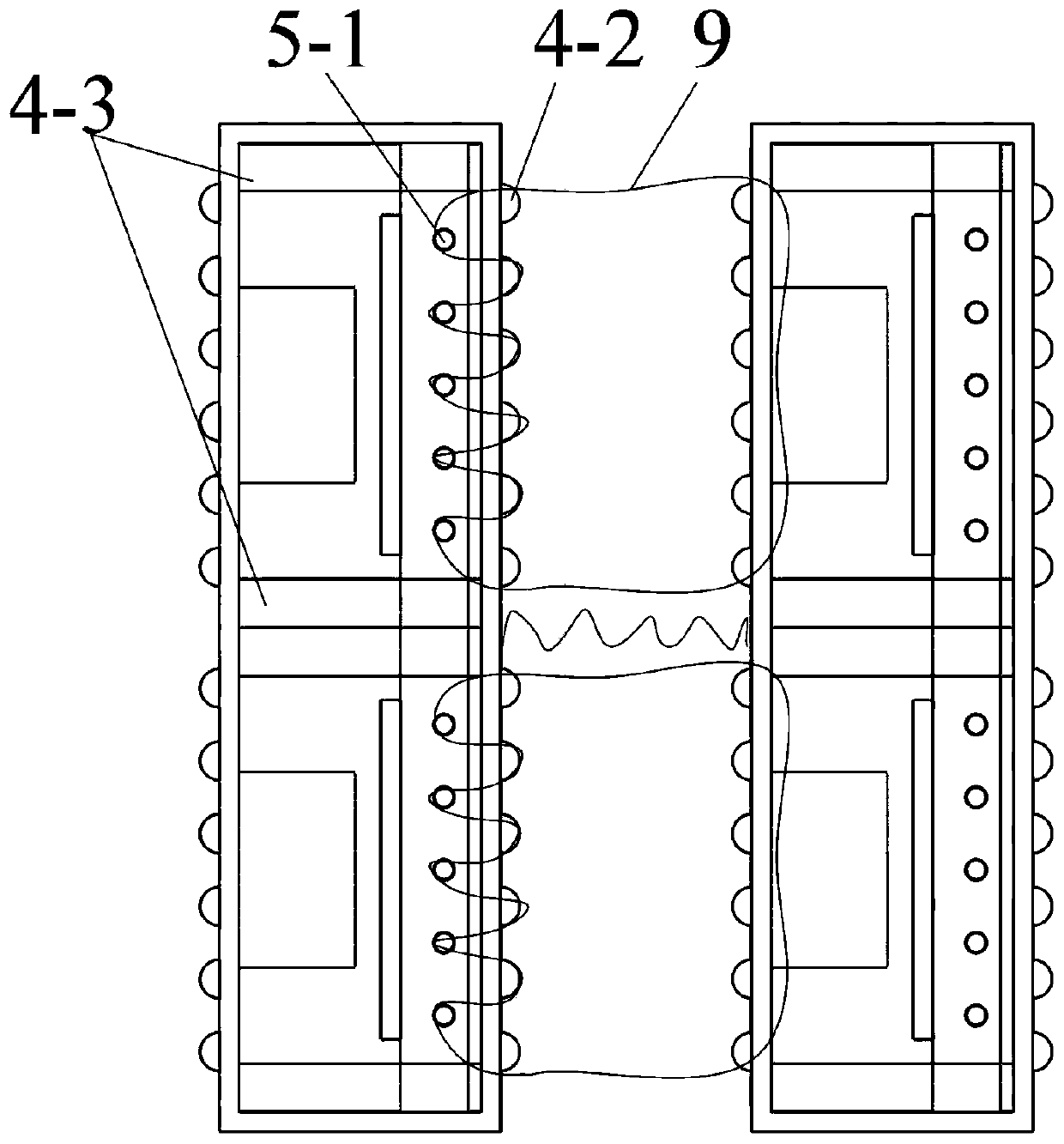
[0021] As shown in the figure, the bionic snake-shaped mobile robot of this embodiment includes: a head 3, a tail 1 and a plurality of unit modules 2 connected in series between the head 3 and the tail 1; in this embodiment, the head 3 and the tail part 1 can adopt a streamlined outline to reduce their walking resistance; the adjacent unit modules 2 are elastically connected by a spring 8; wherein, the spring 8 snaps the two ends of the spring 8 into the front and rear units respectively by means of slots The card slot on the outer wall of the shell 4 of the module 2 can also be mechanically connected by direct bonding; in addition, the spring 8 should be located on the longitudinal centerline of the robot. The unit module 2 includes a housing 4, a slider 5 arranged in the housing 4 in a reciprocating and slidable manner, an electromagnet 7 for attracting the slider 5 to slide, and an electromagnet 7 connected to the slider. 5 and the winding amplification mechanism between th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More